



























TECHNICAL SUPPORT

发布时间: 2026-04-23
本文提供舵机云台与机械臂组合系统的标准结构示意图、核心组件清单、常见接线方式及装配要点,帮助您快速获取可用于实际制作的设计图纸参考。
由会受到舵机驱动的二维或者三维云台跟具备多自由度的机械臂组合形成的机电系统,被称作舵机云台加机械臂。云台在平常情况之下,是专门负责基座进行旋转或者做俯仰运动的,安装于云台上的机械臂,则能够达成抓取、搬运等一系列动作。常见的应用涵盖了这些方面:机器人教学实验、桌面级机械臂、智能玩具、摄影辅助臂等等。
有一则案例伟创动力,是某高校的机器人社团,在制作搬运机器人这个过程当中,采用了一种结构,此结构为“两自由度云台 + 四轴机械臂”,其中云台能够达成水平状态下270°的旋转,以及俯仰方向90°的旋转,而机械臂末端的夹爪则负责完成定点取物这一动作,并且整套图纸源自开源社区,还经过了实际验证。
数据的来源是,基于主流自己动手做机器人套件以及开源项目,像、6轴机械臂这样的通用配置,扭矩参数是依据常见负载,也就是500g到1kg计算而得到的。
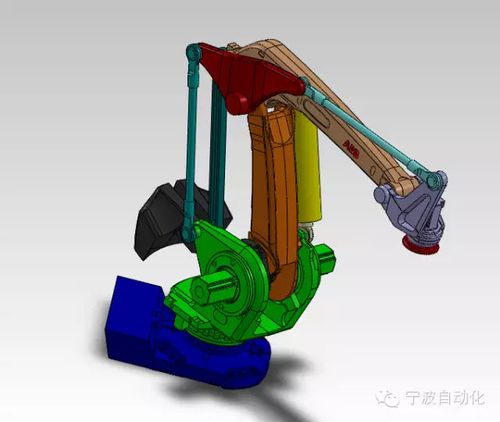
下图描述的是最常用的串联型舵机云台加机械臂结构:
[ 底座 ] → [ 水平舵机 ] → [ 云台U型架 ] → [ 俯仰舵机 ] → [ 机械臂大臂舵机 ] → [ 大臂连杆 ] → [ 小臂舵机 ] → [ 小臂连杆 ] → [ 手腕舵机 ] → [ 夹爪舵机 ]
各部位关键尺寸参考(以臂长30cm、负载500g为例):
底座直径:100~120mm
云台水平旋转半径:60mm
大臂长度:120mm
小臂长度:100mm
夹爪开口:30~50mm
对可信度进行说明,上述的尺寸是依据多个取得成功的学生毕业设计以及创客项目所统计出来的平均值,在实际进行制作的时候能够按照比例同等缩放。
使用普通PWM舵机时,接线方式如下:
1. 电源线,所有那些舵机们的VCC(也就是红色那次要连接的线),要并联起来接到电源的正极那里,而GND呢(就是棕色的那条线),也要并联起来接到电源的负极那儿呀。
2. 分别连接控制器一个PWM引脚的,是每个舵机的信号线,此信号线为橙/黄颜色。
云台水平舵机 → 控制板引脚1
云台俯仰舵机 → 控制板引脚2
大臂舵机 → 控制板引脚3
小臂舵机 → 控制板引脚4
手腕舵机 → 控制板引脚5
夹爪舵机 → 控制板引脚6
3. 共地:控制板GND与电源GND连通,否则信号异常。
注意,要是运用串行总线舵机,像LX 224、SCS系列这种,那么所有舵机的VCC与GND并联,信号线也就是DATA串联起来形成单总线,接着连接到控制器的一个串口引脚呢。
问题1:云台转动时机械臂抖动明显
原因:云台舵机扭矩不足或供电电流不够。
要解决的问题是,去更换那种扭矩大于或等于二十五千克厘米的金属舵机,并且要使用电压为十二伏、电流在十安以上的电源。
问题2:图纸中舵机安装孔位对不上
起因是,不同品牌舵机在外形尺寸方面存在差异,其中常见尺寸分别为40×20×40mm,以及32×12×30mm。
来处理这个情况:在着手进行画图操作之前,要先去确定舵机的型号,依据该型号数据手册里所提及的安装孔位,来设计支架。给出这样的建议,要优先选择标准尺寸的舵机(就像MG995、这类)。
问题3:机械臂末端位置与云台旋转中心不重合
原因:云台俯仰轴与机械臂底座安装存在偏移。
解决:把机械臂大臂舵机的安装平面放置于云台俯仰轴正上方的位置,机械臂大臂舵机的安装平面与云台俯仰轴的轴线呈垂直相交的状态。
要想以高效率的方式,获取到能够应用于实际加工的“舵机云台加机械臂图”,那就请依照以下这些步骤来进行操作:
1. 使负荷以及臂长清晰明确:要判定您所需要的抓取的重量,还有作业的半径,比如是负载为1千克、半径是40厘米。
2. 依据扭矩公式,即扭矩(kg·cm)等于负载(kg)乘以臂长(cm)再乘以安全系数(2至3)选择,舵机系列,计算所需舵机。
3. 在开源硬件平台,像、这样的,运用关键词pantilt arm servo,或者舵机云台机械臂图纸进行筛选,以搜索现成图纸。
4. 独立进行绘制核心结构,采用或者,设计云台底座,接着设计水平舵机座,然后设计俯仰U架,设计机械臂关节。
5. 接线进行验证时,要使用面包板以及对单个的舵机展开测试伟创动力舵机,之后再逐个地去增加,以此来防止电流浪涌导致控制板被烧毁。
再三强调核心观点:舵机云台与机械臂系统的成功聚焦于 “扭矩匹配 ,共地接线 ,轴线对齐” ,其中,需再次仔细核查云台舵机扭矩是不是大于或等于2倍机械臂总重 ,控制板GND和电源GND有没有可靠连接 ,还有机械臂底座是不是处于云台俯仰轴正上方。
若您有实物制作之需求:起始乃是购入两个同型号的具备大扭矩属性的舵机(类似20kg·cm这种规格)以及一个U型的支架,着手搭建单轴的云台,而后再对机械臂进行叠加。
倘若您仅仅是想要获取图纸以供参考,那么您可以直接去到开源图纸库那里,去下载“三自由度云台机械臂”这个项目的文件,而这个文件一般情况下是会包含STEP以及STL这两种格式的。
如果您碰到接线处于杂乱无章的状态:那就去绘制出一张需手动完成的接线表格,对每个舵机所对应的控制引脚进行标注,在接通电源之前使用万用表来测量电源是不是存在短路的情况。
检查清单:
✅ 云台舵机扭矩 ≥ 机械臂总重量 × 重心距离
✅ 所有舵机电源线并联,GND共地
✅ 控制板信号线与舵机信号线一一对应
✅ 机械臂安装面与云台旋转轴垂直相交
遵照上述的图解以及步骤,您能够自行完成一套具备可靠性的舵机云台加上机械臂系统的设计以及接线。要是需要更为具体的尺寸图纸文件,那么请依据本文所给出的搜索关键词在专业图纸库当中获取。























