



























TECHNICAL SUPPORT

发布时间: 2026-04-25
在机器人项目里,舵机是常遇到的控制执行部件。在航模项目中,舵机也是常遇到的控制执行部件。于智能小车等项目之中,舵机同样是特别常遇到的控制执行部件。本文依据多次舵机控制实验的实际操作经验,进行了整理。本文基于多次舵机调试实验的实际操作经验,加以整理。有从硬件连接开始,直至信号调试的全流程核心心得。有贯穿从基本旋转,到角度闭环控制的全流程核心心得。能帮助实验者避开诸多常见误区。并且能够让实验者快捷得到稳定的舵机控制效果。还可以助力实验者迅速获得精准的舵机控制效果。
舵机控制的核心是产生符合其规格的PWM(脉宽调制)信号。 无论使用单片机、舵机控制板还是功能模块伟创动力舵机,只要PWM信号的周期和脉宽范围与舵机要求的参数匹配,舵机就能准确旋转到对应角度。调试中最关键的三个动作是:确认电源功率足够、测量并校准PWM脉宽对应角度、在程序中设定防抖动延时。
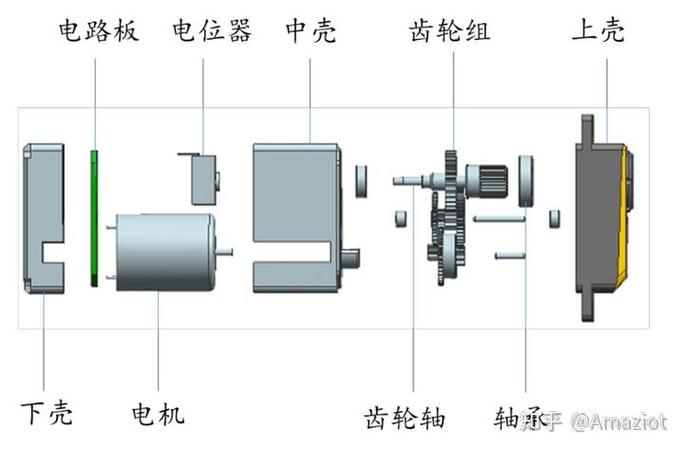
舵机内部有直流电机,还有减速齿轮组,以及角度反馈电位器,另外包含控制电路。控制电路会依据输入的PWM信号脉宽,跟内部电位器反馈的实际角度做比较,以此驱动电机,让输出轴转到目标角度。
标准舵机的PWM参数(通用规格,具体以舵机手册为准):
信号周期:20ms(即50Hz)
脉宽范围:0.5ms ~ 2.5ms
相对应的角度是,一般情况下,0°所对应的是0.5ms的脉宽,90°所对应的是1.5ms的脉宽,180°所对应的是2.5ms的脉宽。
⚠️ 重要提示:不同品牌的舵机,其脉宽 角度对应关系可能不一样,不同型号舵机的脉宽 角度对应关系同样可能存在差异,比如说部分舵机采用1.0ms~2.0ms对应0°~180°。在进行实验之前,查阅所使用舵机的数据手册,或者通过实测来校准。
单独供电的原则是,舵机启动的瞬间,电流比较大,小型舵机大概是200到500mA,中型舵机能够达到1至2A,不要直接从单片机开发板的3.3V/5V引脚获取电力,而应该采用独立的稳压电源,或者是电池供电。
共同接地的要求是,舵机的电源负极也就是GND,要和信号控制器的GND进行可靠的连接。
电容滤波,于舵机电源引脚旁边,并联一个容量处于100至470µF范围的电解电容,能够切实有效地减少抖动现象以及复位方面的问题。
以最常见的单片机(如、STM32)为例:
使用定时器或专用PWM引脚输出50Hz方波。
变更比较寄存器,以此来改变脉宽,脉宽的表示单位为毫秒,其计算方式是这样子的,脉宽(毫秒)等于0.5加上目标角度除以180后再乘以2.0,这里存在一个前提条件,即若采用的是0.5至2.5毫秒的标准。
程序里,每一回更新角度之后,非得等待舵机转动所需的时间,一般情况下,小型舵机转动60°大致需要150到200ms,而完成全行程大约需要400到600ms。
因机械装配以及电位器存在差异,所以实际舵机的中位,也就是理论上1.5ms脉宽的位置,或许并非严格处于90°。正确的做法是:
1. 先输出理论中位脉宽(1.5ms),观察舵机实际角度。
2. 微调脉宽值(每次±0.02ms)直到舵机臂真正垂直于机身。
3. 记录实测中位对应的脉宽,以此为基础计算其他角度。
输出理论上的极小脉宽,像那种0.5毫秒的,去核查是不是达到了0°,要是没达到,稍微减小脉宽,不过可不要低于0.4毫秒,防止出现损坏现象。
输出理论上的最大脉宽,像那2.5毫秒这个数值,去检查一下是不是达到了180度的情况;要是超出了行程范围,就要马上停止。

将测试数据整理成“脉宽角度”对照表,写入程序注释。
1. 在各类情况之中,电源始终都是那至关重要的第一道关卡,它有着单独为设备供电的要求,有着具备足够容量的必要条件,还有着实现稳定共地的关键要点,当把这三个要点妥善处理好之后就能将绝大多数故障给排除掉呢。
2. 切莫去依赖从理论一方面所衍生出来的角度公式 ,每一台舵机它都是存在着个体方面的差异的 ,通过实际测量并且进行标定这才是能够实现精准控制的前提条件。
3. 程序里头一定要预留出转动的时间,舵机这般机械装置,它没办法瞬间就到达指定位置伟创动力,在发出角度指令之后,得等待足够长的时间,这样才能够去发送下一个指令。
4. 控制质量由PWM信号的稳定性所决定,要使用示波器或者逻辑分析仪去确认脉宽精度处于±10µs以内,不然就会出现抖动现象。
5. 记下每一回调试参数,把实际测试得出的“脉宽 角度”对应关系写入实验日志,再把最佳延时值写入实验日志,之后能够直接重复使用。
当拿到新舵机时,要建立标准化测试流程,需按照“电源检测”随后是“中点校准”接着进行“全行程测试”开展“抖动延时测试”的这样一种顺序去执行,以此来形成固定习惯。
去制作属于个人的校准卡:去为自己平常经常会用到的几类舵机去制作出一张脉宽以及角度的对照表,其格式就如同类似这样:脉宽500µs这种情况会对应着0°,脉宽1500µs情况则意味着90°,脉宽2500µs这种情形是对应着180°,然后把它贴在实验台的旁边。
打造能够被重复使用的舵机驱动函数,把“设定角度,进行脉宽计算,输出PWM,做完这些后进行延时等待”组合成一个函数,并且添加角度的限幅保护,也就是限定在0°到180°这个范围,防止超出这个范围从而损坏舵机。
经历以上那些做法以及体会感悟,能够在后续不管是何种涵盖舵机的项目里迅速达成控制以及调试工作,把更多的精力放置于上层的逻辑方面而非底层的排除故障上面。























