



























TECHNICAL SUPPORT

发布时间: 2026-04-25
帮工程师、机器人开发者和DIY爱好者快速拿到能直接参考的设计素材及关键参数标注规范,本文为您系统整理双轴舵机设计方案所需的各类图片资源,像机械结构图、爆炸视图、3D渲染图以及电路原理图。
在设计双轴舵机时,通常需要以下四类图片来完整呈现方案:
发生过这样一个常见问题:有一个机器人团队,他们在设计双臂关节的时候,可以说是由于缺少双轴舵机的准确安装尺寸图,进而致使设计的支架和舵机输出轴中心距有2mm的偏差,最终不得不重新去加工金属件。所以说,获取并且核对带有完整尺寸标注的机械图是设计的第一步。
搜索与,搜索内容为“dual servo”或者“ shaft servo”,能够下载由用户上传的STEP文件以及工程图截图。
的硬件仓库之中,有一些开源舵机项目伟创动力舵机,像、克隆版这类,它们会给出完整的PDF图纸,并且还会提供KiCad电路图。
要是需要自己去设计双轴舵机,那么建议依照下面这些步骤来生成契合生产标准的图片。
1. 经由或者制作3D,要保证双输出轴之间的同轴度公差一定是小于或者等于0.05mm。
2. 生成工程图时,标注以下5个关键参数:
双轴轴心距离(常见值:10mm、15mm、20mm)
输出轴直径与扁平位尺寸(如 Φ6mm 带平面)
安装沉头孔深度与螺纹规格(如 M3 深5mm)
总高度限制(包含后方电位器凸起部分)
线缆引出方向与预留槽宽度
3. 进行360°旋转动画截图的渲染操作:需选用或者工具,分别从俯视、侧视以及轴侧这三个不同角度,输出具备高分辨率的PNG格式图片,以此方便其他人能够迅速地对干涉情况作出评估。
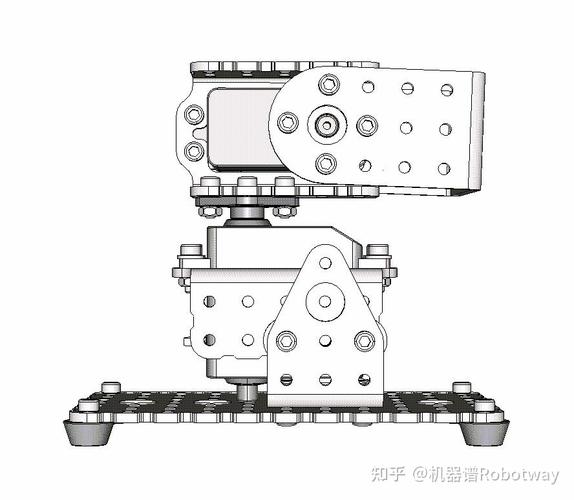
下来是,存有一个,平常可见的,属于中型范畴的,具有双轴结构的舵机,其扭矩大概为20kg·cm,所呈现的,关于设计方案的图片,的构成情况,是这样的。
那图片之上清晰地进行标注,其总长是40毫米,宽为20毫米伟创动力,高为37毫米,双输出轴分别是从两端向外伸出,单侧所伸出的长度为5.3毫米,底部存在4个M2.5安装孔,孔距是33毫米乘10毫米。
包含在图里的有,电机齿也就是11齿的那个,还有一级减速齿是32齿的,另外还有二级双联齿是10齿加28齿的,以及输出齿是34齿的。齿轮材料那是一定要标注的,是金属齿或者混合材料的那种,这其中前两级用的是钢齿,末级用的是铜齿。在实际案例当中,有某教育机器人套件,因为爆炸图没有标注润滑点,结果用户组装之后出现了异常磨损的情况,后来又补充了润滑脂涂抹位置的示意图。
将三条引线的颜色以及功能清晰地予以显示,其中有红色,此红色代表着4.8至8.4V电源,还有棕色,该棕色表示GND,另外有橙色,这橙色意味着PWM信号。与此同时,对电位器的三根线,也就是Vref、wiper、GND的接线焊盘位置进行标注。
1. 查验图片比例,网上所下载的图片,有可能会被拉伸,一定要以标注的尺寸作为标准,而非直接去测量屏幕的像素。
2. 核查视图的方向,存在部分图纸将“输出轴朝上”设立成第一视角,还有部分图纸把“底部安装面朝下”作为标准,在进行装配之前要统一坐标系。
3. 针对要验证的双轴同步性,双轴舵机的两个输出轴是在机械方面刚性连接的情况,图片中的话,应该去核查是否存有“角度偏移”这样的标注,当不存在偏移的时候,那么两轴的转角就是完全同步的形势产生。要是有偏移出现的话,这就表明其是设计成独立控制模式的,这种模式是需要两个电机来达成的。
4. 索取原始矢量图,要是设计是用于开模或者 CNC 的话,那就要求对方给出 DXF 格式或者 DWG 格式的 2D 图,而不是仅仅只是 JPG 截图哦。
要点再次重申:精确、完备且带有尺度标注的双轴舵机设计方案图片,乃是确保机械适配以及控制可靠得以达成的必要条件。要是缺少任何一项关键视图,便极有可能致使项目出现返工情况。
具体行动步骤:
1. 将你的需求予以明确:优先去确定所需要使用扭矩,以及双轴之间的间距,还有电压的范围,之后再去搜索对应规格的设计图。
2. 于至少三个不一样来源处进行相关图片的下载,针对这些图片,去对比它们尺寸标注是不是相同,从中选取最为详细的那一份当作基准。
3. 用CAD软件来进行叠加验证,把图片当作背景给导入进去,再对其重新去描绘轮廓,并且加以核对标注数值,借此确认不存在矛盾之处。
4. 若下载图片内欠缺爆炸图以及电路图,补充自绘所缺失的视图,参照本文第二节的规范并自行绘制,随后开源分享。
最终得出的结论是:不管你是去设计全新的双轴舵机,还是给现有的机器人挑选成品,都要一直把“包含机械尺寸图、爆炸结构图以及电路接口图”的完整图片包当作决策时的依据。按照上面所说的流程去操作,能够避免80%因为图纸不全而引发的装配错误。























