



























TECHNICAL SUPPORT

发布时间: 2026-05-02
本文给出了一套完整的、关于“舵机制作视频讲解图”的实践指南,以此帮助你依从视频讲解以及工程图纸,亲手制作出能够发挥功能的、舵机来。其核心观点为:视频讲解能够解决、动态原理以及操作细节的问题,图纸则提供、精确尺寸以及装配顺序的信息,唯有此二者有机结合起来,才能够高效快捷地开展以及完成制作。所给出的行动建策为:准备下、全套工具以及材料,接着按照步骤去观看、与之对应的视频片段,同时对照图纸进行组装,完成测试以及调试工作。
制作舵机的关键之处在于,同时掌握那显示着控制原理动态情况并伴有视频讲解者,以及体现机械结构精确尺寸且带有图纸者。仅仅只是去看视频十分容易遗漏掉了尺寸方面的细节,单单只是去看图纸特别难以理解其中的动作逻辑。所以呢,这本指南把这两者融合到一起,从而能够让你一次性获取到从初始阶段一直到成品阶段的完整操作路径。
存在一种PWM控制信号,其周期为20ms,其中,高电平处于0.5ms至2.5ms这个范围时,对应的角度是0°至180°。
闭环控制在内,控制芯片会对目标PWM以及电位器反馈电压予以比较,进而驱动电机进行正反转。
常见故障演示:如信号线虚接导致抖动、电压不足导致无力。
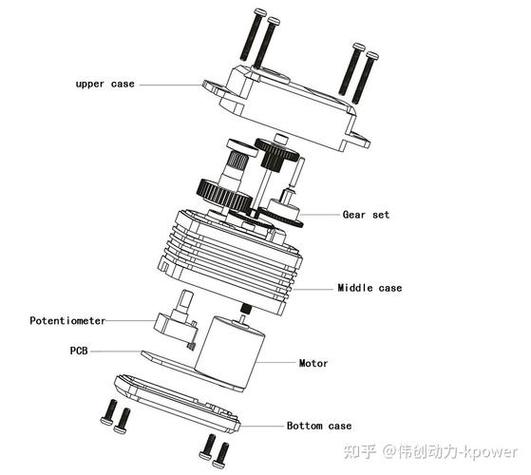
一张标准的舵机图纸应包含以下三张子图:
1. 针对舵机外壳,绘制三视图,要标注安装孔的直径,此直径常见为φ2.5mm,还要标注外壳的壁厚,其壁厚是2mm,同时也要标注输出轴中心的坐标。
2. 针对齿轮装配顺序而言,其呈现具体为,先是电机齿轮起始齿轮装配,接着是中间齿轮组齿轮装配,是输出齿轮齿轮装配,且要对其模数进行标注,此模数通常为0.5模数。
3. 以下是电路连接示意图,电源线,其颜色为红色,代表着 +5V,地线,颜色是棕色,标记为 GND,信号线,橙色的,是 PWM 输入。
常见的这一案例是,存在爱好者,其没有留意图纸里电位器安装孔的偏置角度,此种角度一般是45°,此状况致使组装完毕后不能够归零,所以需要进行返工处理。
采用现成的驱动板,直接去购置舵机驱动模块(像是),进行接线操作,把VCC与5V相连,将GND和GND相接,把PWM同单片机数字口连接。
自行制作简易电路,选用L293D或者驱动芯片,依照图纸里的电路图进行焊接,要留意,驱动芯片一定要加装散热片,不然持续工作会因为过热而被烧毁。
1. 将电机齿轮压装到电机轴上,确保紧配合(可用少量厌氧胶)。
2. 按图纸顺序放入中间齿轮轴,涂抹润滑脂(推荐锂基脂)。
3. 安装输出齿轮和输出轴,装入轴承减少摩擦。
4. 进行验证,用手去转动输出轴的时候,呈现出平顺的状态,不存在卡顿现象;若是出现卡死的情况,那就需要检查一下齿轮是不是装反了,或者轴孔是否存在偏斜的状况。
,电位器的转轴是一定要和输出轴保持同心状态的或者是要借助连杆来实现联动的。然后,最为平常常见的那种方案是这样的:把电位器的齿轮拿来和输出齿轮相互啮合,并且,其减速比是呈现为1相较于1这样的情况的。
进行接线操作时,电位器的两端分别连接GND以及5V,而其处于中间位置的抽头则连接MCU的ADC引脚。
进行校准操作时,要把输出轴转动至处于物理中位即90°的状态伟创动力,然后调节电位器的角度,以此让ADC的读数成为2.5V。
应用激光去切割亚克力板,或者采用3D打印PLA。存在关键尺寸,其一是电机安装孔距,其二是电位器固定槽深度,偏差要小于等于0.2mm。
装配的顺序是,先将电机进行固定,接着把齿轮组放置进去,然后安装电位器,随后盖上盖板,锁上螺丝。常见的错误为,先把外壳锁住之后再安装齿轮,进而致使齿轮出现错位。
按照电路图焊接:电源正负极、PWM信号线、电位器反馈线。
手持万用表通断档,对短路情况展开检查,特别是针对电源正负之间,其电阻大于100kΩ。
装入外壳后,摇动线束检查有无拉扯内部焊点。
1. 在不接PWM信号时,先供5V电源,静态电流应<50mA。
2. 向其中输入处于1.5ms时长的高电平,此高电平为处于90°位置的脉冲,在这种情况下,舵机转向中位,并且要实现锁定。
3. 一点一点地改变PWM占空比,进而观察转角是不是呈线性地跟随,要是出现跳跃或者抖动的情况,那就表明电位器接触不好或者齿轮间隙过分大了。
1. 完整视频要先至少观看一整遍,将你感到疑惑的时间点记录下来,然后再依照本指南的步骤一个一个去攻克。
2. 把图纸按照1:1的比例进行打印,使用卡尺去核对那些关键尺寸,看看是不是和实物,比如说电机的外形,保持一致,要预先进行修正,将那些不一致的地方调整过来。
3. 借助模块化测试的方式,对电路进行单独测试,即给PWM信号以此来查看电机是否转动,将齿轮组进行单独测试,也就是靠手旋转输出轴,最终把两者合并。
4. 采用5V/2A的稳压电源来供电,要防止运用电脑的USB口直接进行供电,因为那样会由于电流不足而致使出现抖动的现象。
5. 把制作的过程,用拍照的方式进行记录,要是出现失败的情况,那么就能够回溯到上一个呈现正常状态的阶段,再次去进行调试。
依循上述视频讲解跟图纸相结合的办法,你能够完整制作成一个标准180°的舵机。要是在某一步骤碰着本文没列出的疑难,需重新观看视频里对应的章节(像齿轮装配、电位器校准),并且对照图纸中的公差标注——绝大多数问题是源于尺寸偏差或者接线错误。祝你制作顺利!























