



























TECHNICAL SUPPORT

发布时间: 2026-05-04
借助图文对照形式,对机器人舵机内部结构原理予以详尽解析,阐述其闭环控制机制,说明PWM信号与角度的映射关系,呈现典型舵机原理图包括的核心要素。不管您身为机器人爱好者,还是电子工程师,亦或是相关专业学生,在阅读本文之后,您便能独立自主看懂且绘制舵机工作原理图。
机器人舵机本质上是一个角度伺服机构。 它的工作基于“闭环控制”原理:控制电路不断比较“目标角度信号”与“当前实际角度(由内部电位器反馈)”,然后驱动电机正转或反转,通过齿轮减速组带动输出轴精确停在任何指定角度(通常为0°~180°或0°~360°)。理解舵机原理,只需抓住三个关键点:PWM信号与角度的对应关系、内部电位器构成的反馈回路、以及电机驱动与减速机构的执行过程。
以下是一张原理图,它是关于标准机器人舵机的伟创动力,其包含了全部信息。您能够对照文字描述,把这些模块逐一在脑海中或者实际图纸上识别出来。
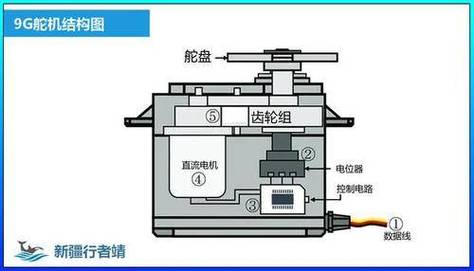
常见的典型舵机,是由下面这三部分共同构成的,在原理图里,一般会借助方框或者电路符号来泾渭分明地分隔开来!
设想这样一个情况,存在一个平常很常见的教育机器人的关节处,当控制电路接收到脉宽是1.5ms的PWM信号,这个信号对应的是90°的中点位置,此时呢,电位器所反馈回来的电压显示当下的角度竟然是120°,在这种状况下,控制电路就会输出反向的电压,以此来驱动电机进行回转,一直持续到电位器的电压和目标角度形成匹配状态为止。
标注意思是,原理图里信号的流向平常是遵照下面这个顺序来进行标注的(能够使用箭头依照次序逐个连接起来):
1. 信号输入:PWM信号通过信号线(橙色/白色)进入控制芯片。
2. 针对于目标角度进行解算操作,就是芯片去测量脉宽,然后要把测量所得的脉宽向着目标角度值进行映射,举例来说就是,比如0.5毫秒会被映射为0度,1.5毫秒被映射为90度,2.5毫秒被映射为180度。
3. 目前角度采样情况是,电位器的滑动端正伴着输出轴进行转动行动,其分压所得的值经由ADC也就是模数转换器,被转化成为现下角度。
4. 误差比较:目标角度减去当前角度,得到误差值(正或负)。
5. 电机驱动:
误差>0:控制H桥电路正向输出,电机正转,角度增大。
误差<0:控制H桥电路反向输出,电机反转,角度减小。
误差=0:关断电机驱动,输出轴保持位置。
6. 速度降低的动作以及输出的情况是这样的,电机开始产生转动的行为,借助齿轮组进而使得速度出现降低的变化,以此带动输出轴,并且带动电位器朝着同一方向同步地进行转动。
7. 循环,第3步到第6步持续不断地运行,其频率一般是在50Hz以上,也就是每20ms就循环一回。
关键性的验证数据是,通用舵机PWM信号的标准是,周期为20ms,高电平脉冲宽度在0.5ms至2.5ms之间伟创动力舵机,对应角度是0°至180°。这个标准适用于市面上95%以上的模拟舵机以及标准数字舵机。其来源是日本、JR等主流厂商共同确立的工业惯例,能够查阅任何一款舵机数据手册来验证。
假使打算去绘制,又或者是解读一幅完整的,名为“机器人舵机原理图片”的东西,这时候要保证涵盖以下全部的元素。
1. 电源输入的部分当中,存在着正极,它是红线,一般处于4.8V至7.2V的范围,还有地线,是棕/黑线,在两者并联着一个电容,其为电解电容,电容值在100至470μF,它在这里的作用是滤除电机尖峰干扰。
2. 部分信号输入:有一条PWM信号线,它是橙/白色的,常常会串联一个电阻,这个电阻的阻值在1kΩ到10kΩ之间,之后才接入到控制芯片的IO口。
3. 分别是,控制芯片,其型号有像TL494这样的,还有NE556,或者是专用舵机控制MCU,例如瑞萨RL78系列。
4. H桥驱动电路,一般是由4个NPN或者PNP三极管组成,或者是由4个MOS管组成,像的内部结构就是这样,它上面标注着“Motor ”。
5. 有一个直流电机,与之两端并联着一个反向续流二极管,像或者这种,其作用是防止反向电动势将驱动管击穿。
6. 用于反馈的电位器回路,电位器的阻值一般处于2kΩ至10kΩ这个范围,其两端分别连接着Vcc与GND,而中心抽头所连接的是控制芯片的ADC引脚。
实际案例里的常见问题是,当舵机出现抖动或者无法进行定位的情况时,在原理图上要检查的是,电位器抽头有没有虚接,续流二极管有没有装反,以及电源滤波电容有没有老化。而这些故障点是对应着原理图里特定符号的。
为让您真正掌握“机器人舵机原理图片”并应用:
1. 想要得到标准原理图,就要去搜索“SG90舵机 电路原理图”,或者搜索“MG995内部结构图” ,这些属于是最常见的学习型号,并非特定品牌里的,只是作为行业通用的学习样本,然后去观察它是不是包含上文所说的六大要素。
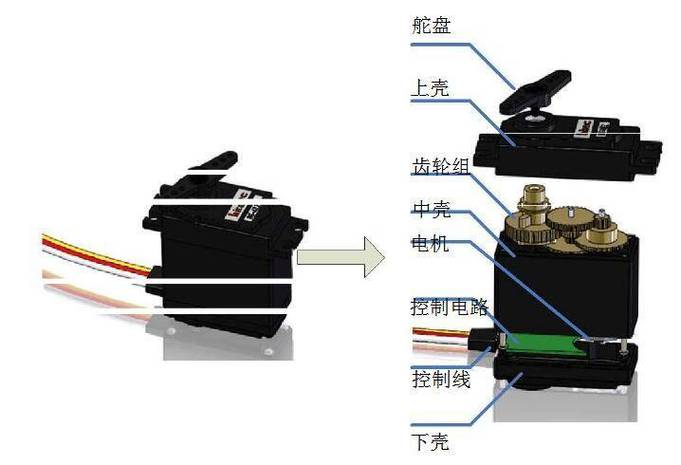
2. 对实物展开对照测试:选取一个处于闲置状态的舵机,运用小刀以小心谨慎的方式切开其外壳,这里要留意防止出现割伤情况,之后通过对比来观察内部的电机、减速齿轮以及控制板与原理图符号之间的逐项对应关系。
3. 信号线测量验证,借助示波器,或者逻辑分析仪,可以为这个PWM信号线做测量,以此方式验证,对应实际转角的,是0.5ms、1.5ms、2.5ms脉宽。您能够使用,或者STM32开发这一板子,去发送不同脉宽的信号,再测量输出轴角度,看是否呈线性对应关系的情况。
4. 模拟故障排查:于原理图里设定常见故障点,像是断开电位器之中抽头,短路续流二极管,而后与实物故障现象相互对照,借此加深对闭环控制的理解。
机器人舵机原理的核心只有两条:
闭环控制:通过电位器反馈实时修正位置,直至目标与反馈一致。
PWM脉宽直接对应角度,其中,0.5毫秒对应0度,1.5毫秒对应90度,2.5毫秒对应180度,周期为20毫秒。
行动建议如下,从即日起,随便挑选一款您手头现有的舵机,找出来其官方数据手册里的“原理框图”或者“内部电路图”,依照本文的第二部分以及第四部分逐个进行标注。与此同时,使用示波器实际测量PWM波形与转角之间的关系。完成这两个步骤之后,您就不会再需要依靠模糊不清的“原理示意图”了,而是能够自己独立分析任何型号舵机的工作逻辑,并且能够迅速定位故障。























