



























TECHNICAL SUPPORT

发布时间: 2026-05-05
舵机的核心功能,在于把微弱的电信号指令,变作精确的机械动作,尤其是角度、速度以及力矩的输出。简而言之,它达成了“电能到机械能”且“弱电控制强电”的关键转换。不管是机器人手臂的精准抓取,还是无人机飞行姿态的实时调整,背后皆是舵机在执行这一核心转换任务。
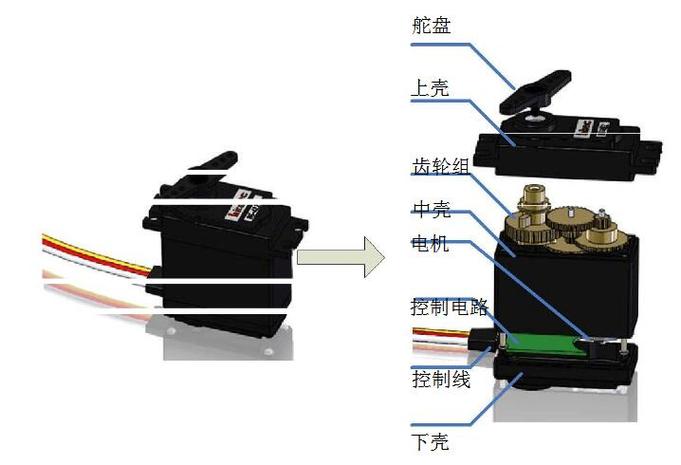
有着电机的舵机,可不是简单的那种电机,它是一个闭环系统,这个闭环系统里包含着电机,还有减速齿轮组,以及位置反馈传感器,另外还有控制电路,它能实现以下几种明确的功能转换:
1. 电信号 → 精确角度位置
接下来要说的可是关于舵机的转换规程,它处于最为基础且核心的那种状态。输入端会接收到一个脉冲宽度信号,就好比那个1.5ms对应中位的情形一样。在这种情况下,输出端就会马上旋转到一个绝对角度,比如说像0°、90°、180°这类的角度。常见的那些用到机器人身上的关节部分、被称为云台的装置以及遥控转向舵面,它们都得依靠这一功能。
比如,有一个机械臂,它具备六个自由度,其每一个关节,都由一个舵机来负责,把控制器发出的数字指令,转换为精度达到一度的旋转,依靠这个来完成复杂的轨迹动作。
2. 持续电能 → 可控力矩输出
能够把电源所给予的电能,借助电机以及减速齿轮转化成为扭矩的是舵机,其输出力矩处于几千克·厘米至几十千克·厘米的范围之内,而且能够凭借锁止力保持静止位置,无需额外消耗能量,这里有实际案例,在200公斤级工业无人机当中伟创动力,是舵机把电子号转化作为驱动巨大升降舵面的力矩,用以抵抗高速气流,进而维持飞行的稳定。
3. 连续旋转运动 → 有限角度往复摆动
舵机内部的结构,决定了它的输出轴,通常情况下,只能在0到180°之间,或者0到270°之间,进行往复运动,这里连续旋转舵机除外。这样的转换,非常适宜用来做开合、抬升、摇摆等周期性动作。它常见于智能家居领域,比如,扫地机器人的滚刷抬升机构,在其中,舵机把电机的高速旋转,转变成每2秒一次的60°摆臂运动,以此来实现越障功能。
4. 电信号 → 线性位移(需配合机构)
即便舵机给出的输出呈现为旋转角度,然而借助摇臂、连杆亦或是丝杠机构,能够轻易地转变为直线的推拉运动。就像在医疗病床的电动推杆那里,舵机进行120°的旋转,经由螺纹丝杠转变成5厘米的直线收缩与伸展,用以调节床板角度。
无舵机方案里,若想达成精确角度控制,就得运用“直流电机+编码器+驱动电路+闭环”,但这种方式复杂性很高,成本也极其昂贵。与之相反的是,舵机将上述的所有组件整合到一个小型封装里,实现了“信号进、动作出”的高效转换。
举一个常见的例子来讲:当普通爱好者制作那种手掌大小的机器人时,只是单纯地给舵机连接上电源以及信号线,如此一来就实现了手指能够弯曲,而这恰恰就展现出了舵机所带来的那种“简化控制”的价值。
为了可靠完成上述转换,请关注三个参数:
精度:一般为0.5°至0.1°,数字舵机比模拟舵机更优。
速度,其单位乃是秒除以六十度,举例来说像零点一二秒除以六十度这样,它会直接对响应的快慢产生影响。
力矩:单位kg·cm,决定了能带动的负载重量。
根据实际开展的任务来进行选择,其中要是涉及无人机舵面那么就得具备高速的特性,对于机械臂基座而言是亟需要大力矩的,而迷你舵机则是适合应用于桌面级的。
有一种本质转换是由舵机达成的,即把低功率且易于处理的控制电信号,转变为高功率且能够精确控制的机械位置以及力矩输出,它将那种表达“想控制哪里”意思的电信号,转化呈现为“已转到精确位置”这样的物理事实。
1. 先是要明确需求,接着是列出您项目所需要的负载力矩,然后是转动速度,是工作角度范围。
2. 照此来匹配舵机的规格,对于力矩而言伟创动力舵机,要留出百分之二十到百分之三十的余量,而速度方面,要能够满足周期所提出的要求。
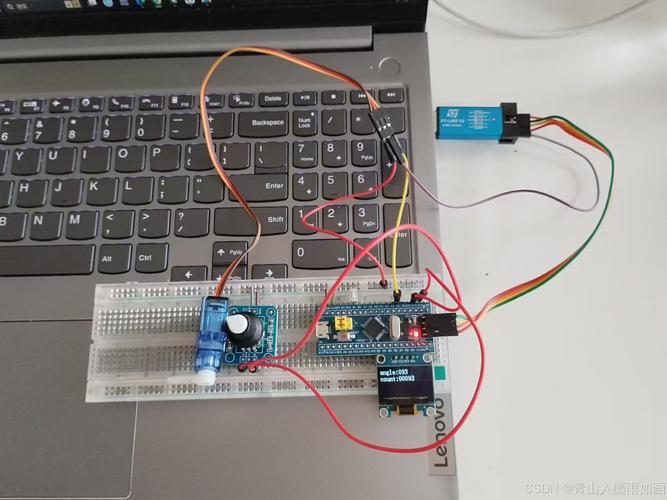
3. 针对测试闭环,借助开发板(像是这种)来生成控制信号,借助该信号实际去驱动舵机,之后测量所到达的角度是不是符合预先设定的预期情况。
4. 进行环境验证,于最终应用那样的场景,像振动、温度变化的情况之下,去测试转换的可靠性。
按照上述步骤,您能够保证舵机精准达成您所期望的那种“电信号至动作”的转换工作,防止因选型有误致使项目延期。























