



























TECHNICAL SUPPORT

发布时间: 2026-05-11
遥控汽车舵机的工作原理这般,简单来讲是一种闭环控制系统,它会接收指令,接着能实时反馈,最终精确到达。当你去拨动遥控器上的转向轮时,舵机并不是单纯地通电转动,而是会将你发出的无线信号转变为一个具体的目标角度,随后借助内部电机驱动齿轮组,最终使得车轮精准且稳定地指向那个角度并把它保持住。
假定好似你于玩一款平常所常见的那种1:10比例的遥控攀爬车,当你迅即地将左方向打满之时,该车的前轮会即刻朝着左方偏转大约30度而后稳住;当你缓缓地回中之时,前轮亦随同着平顺地回正,在这个看上去貌似简单的动作的背后,舵机达成了三次“信号比对”:其“听到”你所要求的左转30度伟创动力舵机,接着“看见”自身当前处于0度,于是发动电机朝着左转,在这个过程里每一个时刻都在对比“还差多少度”,一直到完全契合之后自行停住。要是存在外力,像是撞到石头这种情况,致使车轮被推偏,那么舵机就会马上产生对抗的力矩,强行将其推回到指令角度。舵机的核心本质在于,它是一个具有自我位置检测功能的伺服机构,并非仅仅是单纯进行旋转的马达。
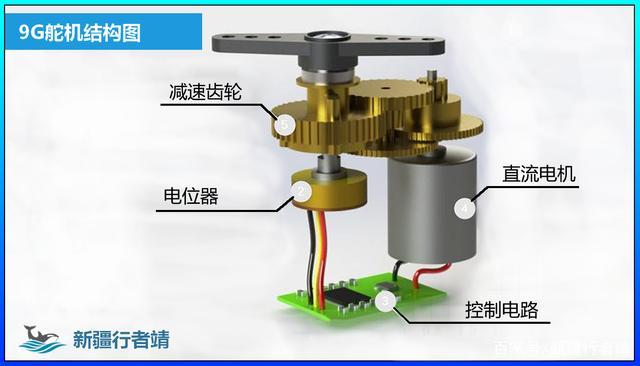
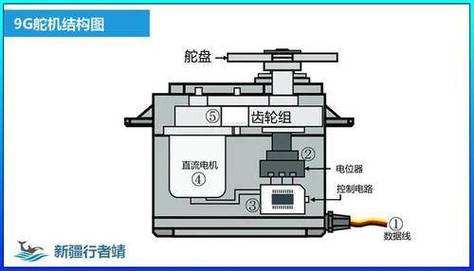
要使得车轮精确地停留在某一个角度,遥控汽车舵机的内部,是通过以下这些部件共同协作来达成闭环控制的。
它接收源于遥控接收机的PWM信号,此信号叫脉冲宽度调制信号,其周期一般是20ms,当中高电平时间0.5ms至2.5ms对应不一样的角度。控制电路板解算出目标角度,与此同时读取来自电位器的当前角度,在计算差值之后决定电机转向以及运转时间。
控制电路发出指令,之后直流电机开始旋转,因为电机转速极高,达到每分钟上万转,所以借助多级减速齿轮组,大幅降低转速,进而提高扭矩,最终带动舵机输出轴转动。
电位器作为一个可变电阻,其电阻值会随着输出轴角度呈线性变化,控制电路板持续对该电阻值进行读取,将其实时换算成“当前实际角度”,当当前角度与目标角度达成一致时,电路会切断电机供电,一旦角度由于外力出现偏离,差值再次出现,电机便会立刻启动进行纠正。
协作流程示例:
接收机发出PWM信号(1.5ms高电平,对应中位0°)
电位器反馈当前实际值为10°(左偏)
控制电路计算:目标0° 当前10° = +10°
电路驱动电机正转,经齿轮组带动输出轴向右
电位器数值逐渐接近0°,电机速度减慢
到达0°瞬间,电机制动停转,车轮保持正中
遥控汽车使用的标准模拟舵机,其控制信号遵循以下对应规则:
留意,不一样品牌、型号的舵机,其最大转角情况或许存在差异,常见的有六十度、九十度、一百二十度、一百八十度,然而,零点五毫秒至二点五毫秒相匹配极限角度时的线性关系,属于行业通用标准。数字舵机运用更高频率,也就是三百赫兹以上的控制信号,响应更为迅速,不过基本原理是相同的。
现象1:舵机抖动或吱吱响
从原理方面来讲,存在这样的情况,电位器出现了磨损,或者其内部电阻存在接触不良的状况,进而致使反馈数值产生大幅度跳动,控制电路随着会多次反复不停地进行修正。又或者是减速齿轮出现了缺齿的现象,这便造成某段角度出现了虚位的情况。
现象2:转向无力或缓慢
原因所在:电机出现老化状况,或者供电电压处于不足情形(就像接收机BEC输出电流小于1A这种样态)。在这个时候,电机力矩呈现下降态势,以至于没办法去克服地面阻力。
现象3:打满方向后回中不准
根源所在:用于减速的齿轮组,其起到止挡限位作用的部件被撞坏,或者电位器的固定螺丝出现松动状况伟创动力,进而致使实际的机械零位和电信号零位之间产生了偏移。
遥控汽车舵机的本质是一个基于电位器位置反馈的闭环伺服系统。它通过PWM信号获得目标角度,通过直流电机和齿轮组执行动作,通过电位器实时验证结果,形成“指令→执行→检测→修正”的完整内循环。没有这个闭环,舵机就只是一个普通减速电机,根本无法实现精密角度的记忆和保持。
为了让你的遥控汽车舵机长期稳定工作,请执行以下三项操作:
1. 规律性地进行电位器的清洁,采用电子触点清洁剂,朝着舵机所存在的缝隙进行 操作,此操作是在将外壳拆卸以后方可实施,如此做的目的是防止由于灰尘的产生致使反馈信号出现跳跃性变化。
2. 核查供电匹配情况,要确认电调BEC输出电流大于或等于2A,其中标准舵机工作电流在200到800mA之间,高峰期电流能够达到1.5A,以此来防止电压下降后出现抖动或者失控。
3. 选型按需选择:
作为普通娱乐用途的车型,其配备的模拟舵机,在响应速度方面,处于0.15至0.20秒每60°的范围,而在扭矩方面,为3至5kg·cm,这样的配置是足够的。
可以用于竞速的车,或者是用于攀爬的车:具备数字舵机,其响应速度小于或等于零点一秒每六十度,扭矩大于或等于十千克厘米,并且要提供金属齿轮。
如果运用超过 6V 的高压系统,像是采用 2S 锂电直接供电这种情况,那就一定要挑选标称是“高压舵机”的产品。
结论就是,遇到遥控车转向出现异常这种情况时,第一步绝非直接去更换整个舵机,而是要依据“信号→供电→电位器反馈→齿轮组”这般的闭环逻辑顺序依次展开排查。明白舵机的工作原理,则是你以最低成本来解决转向问题的唯一正确途径。























