



























TECHNICAL SUPPORT

发布时间: 2026-05-16
这是一种微型伺服电机,它能把电信号转化成精确角度或者位移,它叫舵机,它被广泛用于控制物体姿态、转向以及微小动作,它核心作用是接收控制信号推动内部电机转动借反馈系统精确定位到指定角度达成精准运动控制,本文会深入剖析舵机基本工作原理、核心作用、主要应用领域,还会提供直观图文辅助说明来帮您全面理解这一关键执行器。
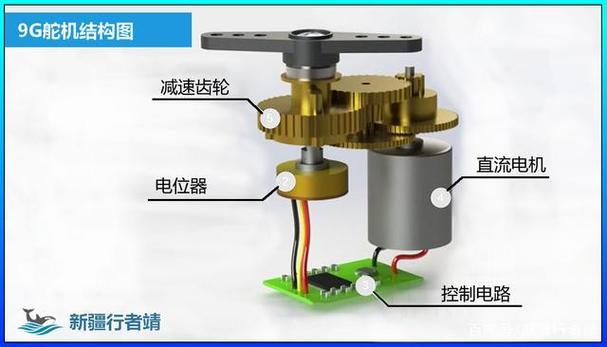
先行深入领会舵机的作用,首要之举乃是从其工作原理方面着手。如下图示呈现出了标准舵机的内部构造以及工作流程:
工作原理图:
1. 信号输入,由控制器发出脉冲宽度调制信号,该控制器比如是单片机,又或是遥控接收机哦。
2. 有这样一个过程,相关电路被称为舵机内部控制电路,它会去接收一种信号,这种信号是PWM信号,之后还会对该信号进行解码,随之识别出目标角度。
3. 驱动电路,依据目标角度指令,对直流电机(有该刷或者无刷的那种)实施驱动,使其进行转动,此为电机驱动。
4. 先是高速转动,那是电机的状态,然后这般高速转动借助多级齿轮组予以减速,减速之后呢,扭矩得以增加,增加了扭矩的动力传递给输出轴。
5. 位置反馈,有一个位置传感器,它与输出轴连接,这个位置传感器常是电位器,会实时监测当前角度,而后将情况反馈给控制电路。
6. 在闭环控制之中,控制电路展开对于目标角度以及当前反馈角度的比较,持续不断地对电机转向做调整,一直到两者达成一致,从而将精准定位予以实现。
它的核心作用能够被归纳成:于闭环控制的状况之下,把电信号指令精准且迅速地转变为指定的机械角度,一般是0°至180°或者0°至360°,还能够提供充足的扭矩用以驱动外部负载。
舵机因具备高精度以及可控性,所以在诸多领域成为了不可被替代的执行部件伟创动力舵机,以下是依照应用领域划分的核心用途,并且附上了典型应用场景的示意图。
这是舵机最经典、最广泛的应用领域。
航模,控制飞机副翼。航模,控制升降舵。航模,控制方向舵。车模,控制车辆转向。船模,控制船舶舵面。其作用,是实现飞行器精确姿态控制。其作用,是实现飞行器航向调整。其作用,是实现车辆精确姿态控制。其作用,是实现车辆航向调整。其作用,是实现船舶精确姿态控制。其作用,是实现船舶航向调整。
是机器人,它驱动机器人的关节,像肩、肘、腕、膝这些关节,以此来达成行走、抓取、转动等动作。其作用在于给予机器人灵活并且可控的运动能力。
示图示意的是,有一个六足的机器人,它的每条腿上面存在多个关节,这些关节都是由舵机来进行驱动的,其目的在于达成复杂的步态。
智能窗帘,它能够驱动窗帘进行开合动作,其作用在于达成远程或者自动化的光线管控之目的。
智能门锁,可驱动锁舌进行伸缩变换,智能猫眼,能调节摄像头的角度,其作用在于增强安全性以及便利性。
示意图呈现出,存在着一个,表现为智能窗帘的系统,其展示出,舵机凭借旋转这种方式,进而带动拉绳,最终实现对窗帘,进行开合方面的控制。
随着无人机的发展,随着 eVTOL(电动垂直起降飞行器)的发展,在低空经济领域,高性能舵机变成了关键执行部件。
无人机:
固定翼无人机:控制副翼、升降舵、方向舵,调整飞行姿态。
云台增稳会用到多旋翼无人机,它能让摄像头在飞行之时维持水平状态,进而拍摄出稳定的画面。
eVTOL也就是垂直起降飞行器,它要操控变桨机构,进而对旋翼桨距予以调整,以此达成垂直起降以及模式转换。
职责:于这些不存在人为操控的系统当中,舵机直接承担着飞行姿态精准调节的职司,负责动力舵面的把控事宜,并且关乎关键机构的展开或者收拢工作,它的响应速度以及稳定性直接对飞行安全以及控制效果产生影响。
STEM教育套件,应用于教学机器人套件里,应用于机械臂等之套件中,助力学生领会自动控制原理。
有着像自动喂食器这样的,还有跟踪太阳的光伏板那样子的,以及自动绘图仪这般的创客/DIY项目。
其具备的功能是,化作履行创意且校验控制的,不具备高的成本数量的情况、轻松地上手的执行部分。
小型自动化设备:用于送料、分拣、点胶等工位的精确定位。
摄影摄像器材:控制专业云台或滑轨的平滑运动。
医疗设备:用于一些小型检测仪器或辅助器械的精密位移控制。
使用场景:于那些有着紧凑环境要求,且要达成可靠、重复性定位的情形之中,去替换掉些大型的伺服系统。
弄懂舵机所具备的作用以及所拥有的用途之后,筛选之际得适配您的核心需求。以下呈现着重要参数跟用途的对应关联:
1. 扭矩(kg·cm):决定舵机能拉动多重的负载。
轻型用途(如小型机器人关节、指示器):15 kg·cm。
中型用途,比如说标准转向,还有智能窗帘,其对应的数值为,6至15千克厘米。
用于重型用途的情况,像是机器人格斗、大型舵面以及工业小设备,要求是在15 kg·cm以上。
2. 速度(秒/60°):决定舵机转动到指定角度的快慢。
普通应用:0.150.25秒/60°。
高速应用,比如竞速伟创动力,还有需要快速响应的机器人,其速度为0.10秒/60°或者更快。
3. 角度范围:
标准舵机:0°180°,适用于大多数需要角度控制场景。
不间断持续旋转的舵机,能够进行三百六十度的连续转动,然而却不存在位置反馈的情况,通常被应用于小车的底盘驱动方面,类似于减速电机这种情况。
超大角度的舵机,像从0度一直到270度这种情况,是在存在要求更大转动区域的特殊场景下而被使用的。
4. 尺寸与重量:直接影响其能否安装到您的设备中。
5. 对于接口以及信号而言,绝大多数的舵机运用的是三线接口,也就是电源接口、地线接口以及信号接口,需接收标准的PWM信号,并且能够与、树莓派、STM32等为主的主流控制器实现兼容性。
核心行动提示这样来:在挑选舵机以前,一定要弄清楚自身的核心需求究竟是精准定位方面,还是快速响应这块,亦或是大扭矩输出这一情况。是按照负载去确定所需的扭矩顺带留出一定余量,接着依据动作速度的要求去挑选恰当的速度规格,根据安装空间来确定尺寸。对于像无人机、机器人这类动态应用而言,还得留意舵机的钢齿轮、关于防水以及防震等可靠性设计。
归结来讲,舵机那个核心的作用是借助闭环的伺服系统达成精准的角度或者位置控制,它的用途从以往的玩具、机器人那块儿,已然拓展至智能家居、蓬勃兴起的低空经济无人系统以及各种各样的工业自动化场景,弄明白它的作功原理及各个参数的意思,乃是把它成功运用在项目里、发挥其核心价值的关键所在。























