



























TECHNICAL SUPPORT

发布时间: 2026-05-16
于机器人、航模或者自动化项目里头,要求舵机转动角度精确至 0.5 度是一种常见且精细的需求,这不但能够提升动作的平滑程度,还是达成高精度定位那般至关重要的所在。此文将会系统地阐释借助 达成通用舵机 0.5 度精度控制的核心原理、具体办法以及完整代码,目的在于成为您解决此问题的最终指南。
1. 舵机标准控制原理:
通常用于控制舵机的标准模拟舵机,比如那种180度范围的舵机啊,一般常是凭借PWM也就是脉宽调制信号来操控的。其控制信号的周期大概是20ms也就是50Hz这儿,它的脉宽一般处于0.5ms到2.5ms这个区间当中,而这个脉宽情况是对应着舵机轴从0度到180度范围去变换的。这便是一种线性映射关系了。
2. “0.5度”控制精度的实现基础:
物理方面存在限制,标准舵机当中,其机械精度存在物理极限,并且内部电位器的分辨率也存在物理极限,理论精度一般情况下是在1度左右。
控制精度(此为本文重点之处):我们要在的“控制信号”这个层面达成0.5度的分辨能力。其核心要点在于借助的高精度定时器,把控制脉宽出现的变化一步一步去做调整,直到能调整到足以映射到0.5度所需要的精度。
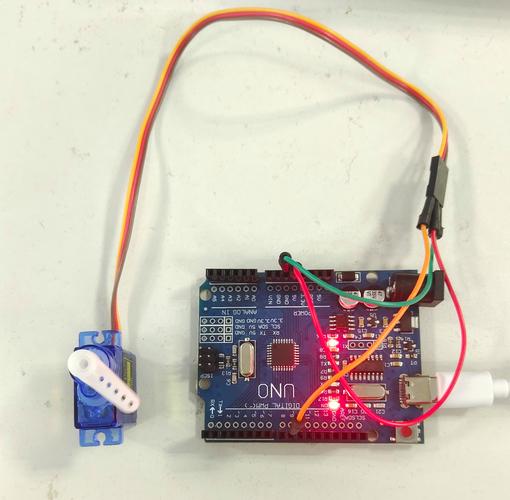
硬件连接:
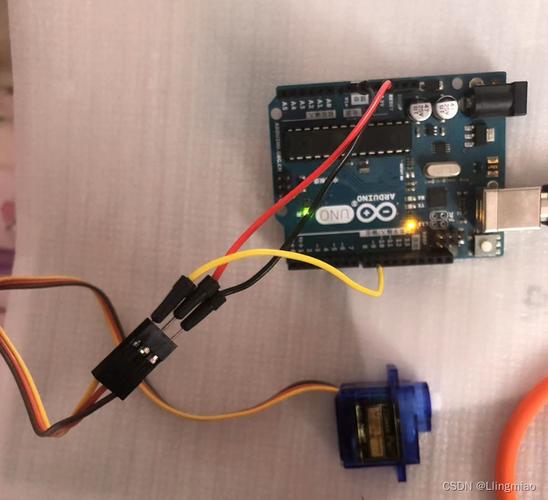
把舵机三根线里的信号线,也就是通常是黄色或者白色的那根线,连接到的任意一个支持PWM输出的数字引脚,像9号引脚。电源,那根红色的线,还有地线,棕色或者黑色的那根线,连接到外部电源,比如5V适配器或者电池组,并且要保证和这个电源共地。
使用标准Servo库并进行参数换算(推荐入门)
IDE所内置的Servo库属于基本接口,其中write()函数把度当作数字单位。
#
Servo ;
int = 0; // 目标角度,假设为0.5度的倍数伟创动力,如 0, 0.5, 1.0 ...
void setup() {
.(9); // 舵机信号线接9号引脚
}
void loop() {
// 核心:将0.5度为单位的目标角度,换算为库函数可识别的微秒脉宽
// 脉宽范围:0度对应500us, 180度对应,每度对应脉宽变化 (2500500)/180 ≈ 11.11us
float ds = 500 + ( 11.111); // 精细计算
.(ds); // 使用高精度微秒控制函数
delay(15); // 等待舵机执行到位
// 下面是转动测试示例:
// for(float angle = 0; angle <= 180; angle += 0.5) {
// .(500 + angle 11.111);
// delay(50);
// }
}
该方法重点在于, 要是直接运用write()函数,整数度是没法满足需求的, 所以得使用(),并且要提供经过精确计算得到的脉宽值。
使用高精度定时器库(如)实现1us级控制
要达成更稳定、更精确的脉宽生成,防止Servo库于不少高刷新率情形下存在性的局限,能够运用专门的高精度数据集合。
# // 需先安装此库
;
int = 0; // 目标角度,精确到0.5度
void setup() {
.(9);
}
void loop() {
// 采用整型运算减小误差,映射0180度到500
// 将角度乘以2,以0.5度为最小单位,则范围变为0360单位
int = 2; // 例如,0.5度 > 1单位
// 计算脉宽:500us基础 + (角度单位 (2500500)/360)
int = 500 + ( * 2000L / 360); // 使用长整型避免溢出
.write(); // 此库的write函数参数即为微秒数
delay(15);
}
此方法具备这样的优势,其采用整型运算,这种运算方式精度更高,再者它对系统中断所产生的影响更小,因而适合应用于存在多舵机的场景,或者是对时序有着严格要求的场景。
1. 舵机选型属于基础范畴,不是所有舵机都能够稳定回应0.5度的信号变化,要挑选“数码舵机”或者“高分辨率舵机”,它们内部运用MCU进行控制,对脉宽的响应更为灵敏,机械齿轮背隙更小,参考内容里提到的“数码标准舵机”、“可控多圈360°”等类型,其内部电路更易于达成精细控制。
2. 电源的稳定性有着极其关键的必要性,因为电压出现波动的话,会直接对舵机内部的电位器反馈以及电机扭矩造成影响,进而致使定位产生抖动或者出现误差,所以一定要使用独立且稳压功能的电源,并且要针对和舵机开展良好的滤波操作。
3. 实际开展测试以及校准工作:鉴于舵机自身个体间存在差异,并且存在机械安装方面的误差,所以理论计算得出的值需要借助实际进行的测试来完成校准。着手编写一个简易的扫描程序,促使舵机按照0.5度作为步进幅度从0度开始朝着180度移动,对实际呈现的物理位置予以观察并做好记录。能够凭借修正计算脉宽的公式以此来补偿非线性状况或者零点偏移情况。
4. 要怎么去判断是不是达到了0.5度那精确的程度呢 ,靠肉眼去观察的话搞不好不太容易看得出来。能够把一个比较长的指针固定在舵机转盘之上 ,在距离比较远的地方搁置一个很精细的刻度尺 ,借助视频慢放来查看指针位置的改变情况 ,或者连接高精度角度传感器进而展开闭环反馈验证。
结论与行动建议:
达成操控舵机达0.5度精度,关键路径为,挑选一款具备高响应性能的数码舵机,于代码里头运用高精度脉宽控制函数(比如)或者高精度舵机驱动库伟创动力舵机,并且搭配精准的脉宽计算公式以及稳定的电源供给。
所建议您当下立刻采取的步骤是,其一,运用()函数去编写一个简易的脉宽扫描程序,像是从500us逐步递增到,步进为11us,借助示波器或者逻辑分析仪去验证输出信号是不是精确;其二,把舵机连接接入,运用上文“方法一”的代码展开实测以及校准。按照这一严谨严格的技术路径,便能够在项目需求当中稳定地达成亚度级的精密角度控制。























