



























TECHNICAL SUPPORT

发布时间: 2026-05-19
在无人机、机器人等自动控制设备里,飞控系统跟舵机协同开展工作,这属于达成精准动作的关键所在。好多开发者以及爱好者于实践期间,常常会碰到舵机响应不精准、出现抖动或者没办法驱动的状况。为此文章会直接进入核心部分,利用最为简单的语言去阐释飞控控制舵机的完整链路,这个链路得涵盖从信号发出一直到机械执行的整个过程,并且还要提供能够直接进行验证的接线以及配置方案,以此保证您在看完之后具备当即上手展开调试舵机的必要条件。
控制舵机的飞控,它的本质在于发送电信号,这种电信号名为脉冲宽度调制,也就是PWM。舵机内部的控制电路,唯一能够识别的正是这种信号。您不需要深入去探究复杂的理论,只需要记住一个核心等式:
舵机转动角度 = PWM信号的高电平脉冲宽度
对于最常见的模拟舵机,其控制关系通常遵循一个行业标准:
脉冲宽度一点零毫秒,致使舵机转动到最小角度,像是 minus 四十五度或是零度,情况如此。
脉冲宽度1.5ms → 舵机转动至中间角度(0°或90°)
当脉冲宽度为2.0ms时,舵机就会转动到最大角度,这个角度可能是+45°,也可能是180°。
飞控的关键任务,是依据当下飞行姿态或者指令,精准算出所需的脉冲宽度,借由其舵机输出通道(一般标记为S1、S2等)生成相应的PWM波。
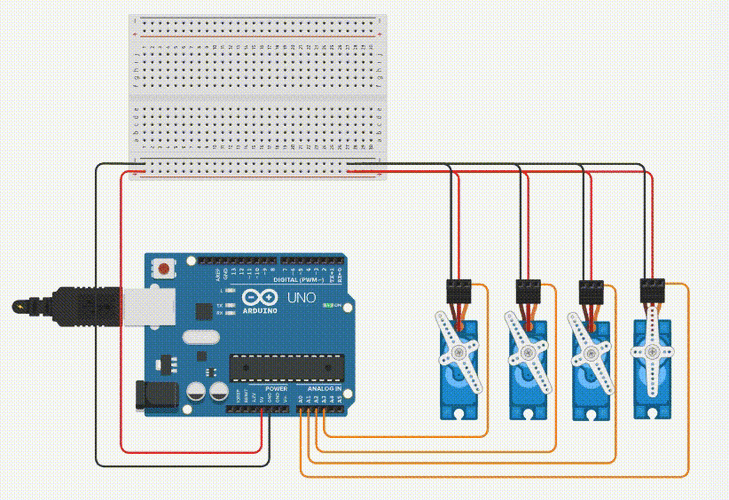
造成控制失败局面频繁出现的最为常见根源因素是出现接线错误情况,请严格依照以下所规定标准的三线制连接方式来进行操作,并且要运用万用表去加以验证。
1. 电源线,一般是红色或者是棕色那种伟创动力舵机,它连接飞控的“+”或者“VCC”引脚。很关键的是,要去确认飞控这个引脚的输出电压,和舵机额定电压,通常是5V或者6V的那种相匹配,不然就会出现损坏舵机或者飞控的情况。
2. 地线,一般呈现为黑色或者是棕色,它用于连接飞控的“”引脚,或者是连接飞控的“GND”引脚。
3. 具有通常呈现为白色、黄色或者橙色特征的信号线,用于连接飞控那里标记着 “S” 或者 “SIG” 的信号输出引脚。
连线之后进行验证,运用万用表直流电压档去测舵机电源线跟地线之间的电压;要确认该电压处于舵机额定电压范围以内;这属于排除电源问题的首要步骤。
仅是接线正确这一情形还不满足要求,得在飞控地面站软件里,像 、 这类软件中,做好正确的配置。
1. 舵机类型进行设置时,于输出模式里,也就是或者Servo,要挑选“舵机”模式,而不是“电机”模式。
2. 频率设定方面:针对于模拟舵机而言,要把PWM频率设定成50Hz(周期为20ms)。这属于绝大多数模拟舵机的标准刷新率。数字舵机有可能支持更高频率(像是300Hz),需要以舵机说明书为准。
3. 针对舵机角度范围不准确这一棘手问题,行程量校准成为了最为核心且关键的决定性步骤。在地面站里,需要去寻觅那舵机行程调整或者端点设置之处。一般而言,它常常靠两个步骤来成功达成:句号。
把遥控器摇杆置于最低位点,去调整对应通道所具有的最小值,像这样的值,查看舵机是不是抵达了预期之中的最小物理位置。

把遥控器摇杆推至最高的位置,去调节对应通道范畴的最大值,也就是像一样的数值,查看舵机是不是抵达了预料的最大物理所在位置。
反复微调直至舵机运动范围与指令完全匹配。
当舵机不工作时,请按此标准化流程排查,不要盲目更换部件:
1. 检查电源:使用万用表测量舵机接口电压,确保供电正常且稳定。
2. 查验信号,运用示波器,或者能够检测PWM的舵机测试仪伟创动力,去连接信号线,留意考察当给予指令之际,是不是存在PWM脉冲输出。要是没有信号,那么问题就出在飞控配置或者硬件故障方面。
3. 查证舵机单体状况:致使可疑舵机径直连接于单独的舵机测试仪,或者连接至已知状态正常的接收机,以此测验其自身是否处于完好状态。
4. 检查机械结构,手动转动舵盘,查看有没有卡死、过载或者扫齿的状况,舵机堵转若发生触发保护就会导致不动作。
再重复一下核心观点:飞控借助输出那种有着特定脉冲宽度的PWM信号,以此来对舵机角度实施控制,正确的电压匹配、接线的先后顺序、50Hz频率的设定以及行程量的校准,是达成成功控制的四大关键支撑点。
行动方面的建议是,当您下一回调试飞控以及舵机的时候,一定要依照“先接通电源再连接信号,先检硬件后查软件”所示的原则。先是运用万用表去确认供电的电压情况,紧接着于飞控地面站里确认输出模式已然设定为舵机并且频率是50Hz,最终展开细致入微的行程量校准工作。这样一套标准化的操作流程能够具有系统性地处理99%的舵机控制方面的问题。























