



























TECHNICAL SUPPORT

发布时间: 2026-04-19
舵机是一种执行机构,它能够精确控制旋转角度,常见于机器关节这个部位,还有航模舵面、摄像头云台等设备当中。简单来讲,舵机的核心原理在于接收控制信号,驱动电机转动,并且利用反馈系统把输出轴准确停在指定角度上。本文会以一个关于机器人手臂关节的典型例子,详细拆解舵机将如何实现“指哪打哪”这样精准定位的情况,以此帮助你快速把控其工作原理。
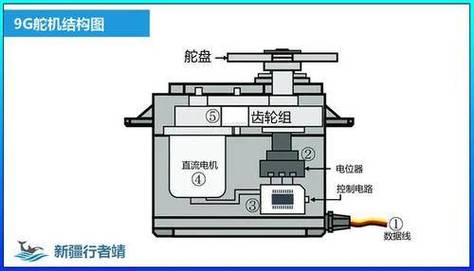
一个标准舵机(通常指小型伺服舵机)的内部包含以下核心部件:
直流电机:提供旋转动力。
减速齿轮组:降低转速、增大输出扭矩。
控制电路板:解析输入信号,控制电机转动和停止。
电位器(角度传感器):随输出轴转动伟创动力,实时反馈当前角度位置。
输出轴:连接外部负载,输出角度和力矩。
把控制机器人手臂抬起到30°当作例子,舵机有着这样的工作过程,它遵循“指令执行反馈修正”的闭环逻辑:
步骤1:接收控制信号
舵机通常会接收PWM也就是脉宽调制信号,标准周期是20ms,其中高电平持续时间也就是脉宽在0.5ms到2.5ms之间变动,对应着0°到180°的角度范围 ,部分舵机支持0°到360°。
脉宽0.5ms → 要求转到0°
脉宽1.5ms → 要求转到90°
脉宽2.5ms → 要求转到180°
步骤2:信号比较
由控制电路板负责接收脉宽值,与此同时,电位器反馈当前角度电压值,之后,控制电路板把所收到的脉宽值跟电位器反馈的当前角度电压值开展比较,进而计算出“目标角度”跟“实际角度”之间所存在的差值,也就是误差值。
步骤3:驱动电机
要是存在有误差,比如当前实际角度是0°,目标角度为30°,那么电路板就会控制电机朝着减少误差的方向旋转,也就是正转或者反转。电机借助减速齿轮组带动输出轴转动,同时也带动电位器转动。
步骤4:实时反馈
电位器跟着输出轴同步转动,它的电阻值发生变化进而产生相应的电压信号,然后持续不断地送回到控制电路板。
步骤5:到达停止
在电位器反馈的电压跟目标脉宽所对应的电压呈现一致的状况下,也即是实际角度等同于目标角度时,电路板会停止为电机供应电力,输出轴会维持在指定的位置。哪怕有外力尝试去推动输出轴,电路板也能够检测到偏差,并且会马上反向驱动电机进行抵抗,以此达成位置锁定。
上述过程,每秒施行重复动作,次数在数十次到上百次之间,以此来保证,舵机能够快速且稳定地,停留在任意所指定的角度。
误区1:舵机角度由电压高低控制
存在错误,舵机角度是由PWM信号之中脉冲宽度也就是高电平持续时间来进行控制的,并非电压幅度,电压范围像4.8V到6.0V这种情况仅仅会对电机扭矩以及响应速度产生影响,并不会改变角度对应关系。
误区2:舵机可以无限连续旋转
有误,一般普通标准舵机的机械限位常常是0°至180°或者0°至270°,要是强行超越这个范围会致使齿轮或者电位器损坏,要是需要进行连续旋转,那就选用“连续旋转舵机”(在这种情况下角度控制会失效,变为速度控制)。
误区3:信号线接反会烧毁舵机
风险程度非常高。舵机的三条线,也就是电源正极、负极以及信号线,一旦接错,就有可能致使电路板或者电机出现损坏的情况。在进行接线之前,一定要确认,红色的线是VCC,其电压范围是4.8V到7.2V,棕色或者黑色的线是GND,橙色或者白色的线是信号线。
再次重申核心观点:舵机的本质是一个角度闭环伺服系统,它输入PWM脉宽信号,在内部比较实际角度与目标角度的误差,然后驱动电机修正,接着电位器反馈,一直持续到误差归零。正是这种“测量 比较 执行 再测量”的闭环机制,使得舵机能以±1°以内的精度稳定停在任意指定位置。
给你的行动建议:
1. 进行动手实验,准备一个标准舵机,比如SG90或MG995类型的,准备一块开发板或者STM32开发板伟创动力舵机,编写程序来输出不同脉宽的PWM信号,从而观察输出轴角度的变化,这是理解PWM与角度对应关系最为快速的方式。
2. 选型要点:根据项目需求选择舵机参数——
要是存在大扭矩方面的需求,像是应用于机器人腿这种情况,那么就要选择金属齿轮,以及大尺寸舵机,并且该大尺寸舵机的扭矩要大于或等于15kg·cm的。
如果你需要那种能够快速做出响应的情况(就好比无人机云台那样),那么可以选择空心杯电机或者数字舵机(它们的响应时间要小于等于零点零七秒每六十度)。
需要静音低功耗:选塑料齿轮、微型舵机
3. 第一位是安全:在进行调试的时候,使用低压(5V)供电先,以此来防止手指呀或者衣物被卷入到那些转动的部件当中去;再确定电源的该电流充足(单舵机启动的瞬间能够达到1至2A)。
于掌握舵机原理之后,你能够精准地去控制任意一台机械臂,或者是机器人,又或者是的角度运动。要是需要进一步学习PWM信号生成,或者是多舵机同步控制,那就请查阅对应微控制器的官方数据手册。























