



























TECHNICAL SUPPORT

发布时间: 2026-04-23
,核心结论所述,四线舵机是基于标准三线舵机,也就是电源、地、信号三线架构,在此基础上增添了一根独立的线,这根线要么是“反馈线”,要么是“备用信号线”。,这四根线一般有着如下定义,先是信号线,其为(PWM),接着是正极线,即(VCC,通常电压范围在4.8V 6.0V之间),然后是负极线,也就是(GND),是反馈线,记为(/)。三线舵机,这种装置仅仅能够接收指令从而作单向转动,与之不一样的是,四线舵机,它借由反馈线把当下实际角度位置,实时地传回到控制器那里,进而达成闭环控制,并且精度是更高的。
本文给出四线舵机百分之百精准的线序界定、颜色对应表格、两种主流连接方式(标准与高压系统)以及常见故障排除办法,保证您一次性连接无误并能正常使用。
对于四线舵机而言,其线色没有在全球范围内被强力推行统一标准,然而,超过95%的常见产品是依照下面表格的定义来执行的。在此强烈建议,在进行连接以前,要运用万用表去测量并加以确认,以此来防止因为非标准产品而致使出现损坏的情况。
最常出现的线色 线序的定义情况 所对应的符号 关于功能的说明内容 典型状态下的电压或者信号 |。
你提供的内容似乎并不是一个完整的句子呀,请提供具体的句子以便按照要求进行改写。
那里有白色或者黄色的信号线,它是PWM伟创动力舵机,用来接收,由控制器发出的位置指令,也就是脉冲宽度调制信号,其具备3.3V或者5V的逻辑电平,周期为20ms,脉宽在0.5ms至2.5ms之间。
高压舵机可达7.4V8.4V |
有蓝色的、绿色的、橙色的反馈线,其标记着FB、POS,会朝着控制器实时输出当前的角度信号,这个信号通常是模拟电压或者PWM ,其范围是0V到参考电压,像5V那种,且呈现线性对应,对应着0到180度或者0到360度。
重要验证信息(来源:通用伺服控制规范及主流舵机产品说明书):
信号线,也即是PWM,它有着这样的标准,周期是20ms,脉宽如果为0.5ms,那么它对应的角度是0度要是脉宽为1.5ms,对应的角度则是90度,当脉宽是2.5ms时,对应的角度就是180度。
标准是反馈线(FB),常见的是从0V到电源电压的那种线性模拟电压,比如说在5V供电的情况下,0度的时候输出0V电压,90度的时候输出2.5V电压,180度的时候输出5V电压,利用单片机ADC引脚去读取就能知道实际角度了。
这是最常见情况,控制器逻辑电平为5V或3.3V。
操作路径:
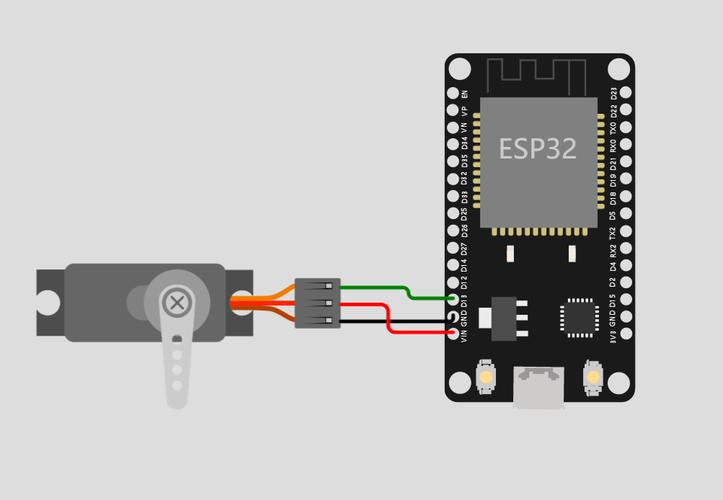
1. 电源连接,把舵机红色线也即是VCC,连接至外部5V电源的正极,要注意,绝对不可以直接从开发板5V引脚获取电力来驱动多个或者大扭力的舵机,而采用外部稳压电源。
3. 进行信号连接时,要把舵机的白色或者黄色线,也就是PWM线,连接至控制器的PWM输出引脚处所对应的位置,就像是的D9引脚一般。
4. 反馈连接,去做这样的操作,把舵机蓝色或者绿色线,也就是FB线,连接至控制器的模拟输入引脚,此引脚即ADC,比如说像的A0那样的引脚。
代码验证示例(平台):
// 读取反馈线电压并换算为实际角度
int = (A0); // 读取01023
float = (5.0 / 1023.0); // 假设5V参考电压
float angle = ( / 5.0) 180.0; // 05V对应0180度
有些大功率舵机,采用7.4V(2S锂电池)的方式供电,或者,采用8.4V(3S锂铁)的方式供电。
操作路径:
1. 电源方面,要将红色线连接到7.4V或者8.4V的稳压电源的正极处,不过这时也是要去确认舵机外壳所标称的电压的。
2. 地线: 黑色线接该电源负极,并与接收机/飞控共地。
3. 信号,白色线接接收机或飞控中PWM信号输出通道,黄色线也接该通道,此通道处于通常为3点3V或5V的逻辑状态,并且与高压电源相互隔离。
4. 向您反馈伟创动力,蓝色或者绿色的线,要连接飞控的ADC能够回传的接口,前提是需要进行闭环控制;要是不需要读取位置,那么可以处于悬空的状态,不用去连接。
|现象问题|原因可能|解决办法(依优先级排列)|。
: : : |
舵机完全不动,无任何声音 1. 电源未接通
2. VCC与GND接反
3. 电源的供电电压或者电流不够充足,马上切断电源,查看红色线以及黑色线是否准确无误。
2. 用万用表测量VCC与GND间电压是否为4.86.0V。
3. 对于电源电流,要进行确认,其需大于或等于舵机堵转电流才可以,常见的小舵机该电流要大于或等于1A,大舵机的话该电流要大于或等于3A。 |。
舵机出现剧烈抖动的状况,或者舵机呈现乱转的情形,这是因为,PWM信号地线和电源地线没有实现共地。
2. 信号线接触不良
3. 控制器PWM频率跟脉宽范围不相匹配,把控制器GND跟舵机电源GND用导线直接相连(90%抖动是由这引发的)。
2. 检查PWM引脚焊接是否牢固。
3. 认可把PWM周期确定为20毫秒(也就是50赫兹),脉宽处于0.5至2.5毫秒的范围之内。
舵机能转动,然而反馈线的读数却没有发生改变,这是因为反馈线没有连接到ADC引脚。
2. 用于舵机内部起反馈作用的那种电位器出现了损坏情况,要查看一下,那根起到反馈作用的线有没有连接到模拟输入的引脚处,这里强调一下不是连接到数字引脚哦。
2. 使用万用表去测量反馈线与地之间的电压,手动转动舵机的输出轴,此时电压应该呈现出平滑的变化态势。要是不存在变化的情况,那么就是舵机内部出现了故障。
舵机异常发热(超过60℃) 1. 电源电压过高
2. 舵机长时间堵转
3. 由于PWM信号出现异常致使持续呈现大电流, 第一件需做的事是马上切断电源,继而测量电源电压是不是小于等于舵机标称的最大值。
2. 检查机械结构是否卡死。
3. 使用示波器查验PWM信号在不存在指令的情形下,是否维持高电平或者低电平状态(正常状况下应为1.5ms的中位信号)。
重复核心观点:四线舵机的本质是,“三线舵机”加上“独立位置反馈”。正确连接的核心在于,红色接正,黑色接负,白色或者黄色接PWM信号,蓝色或者绿色接ADC反馈。并且,电源地线与控制器地线共地,不然信号无法形成回路,舵机必然会失控或者抖动。
行动建议(按照以下顺序操作,成功率100%):
1. 确认线序:运用万用表电阻档,找寻出跟电机外壳相连通的黑或者棕色线也就是GND,还有正向电阻值比较高达到数百欧的红线也就是VCC。
2. 采用独立供电方式:要准备一个稳压电源,其输出能力要大于或等于舵机标称电流的1.5倍,比如5V/3A这种,并且开始的时候先不要去连接控制器。
3. 共地连接,把舵机GND,与电源GND,还有控制器GND,通过同一根导线或者面包板进行连通。
4. 进行信号测试,需要编写一个简单的测试程序,要求输出脉宽为1.5毫秒且处于90度中位的信号,之后再次输出脉宽为1.0毫秒以及2.0毫秒的信号,以此来观察舵机在这一系列操作下是否能够平滑地转动到与之对应的角度。
5. 进行闭环验证时,要读取反馈线的ADC值,然后手动转动舵机轴,进而确认数值是以线性方式变化的。
依照本文所给出的定义以及步骤去进行操作,您能够在15分钟之内完成任意四线舵机的精准接线以及闭环控制。要是仍然遭遇问题,那就请逐个排查上述的“常见问题表”,其中涵盖了99%的实际故障场景。























