



























TECHNICAL SUPPORT

发布时间: 2026-04-26
无论你是经验丰富的飞手,抑或是首次组装的新手,飞行器组装里固定翼无人机舵机安装乃是极为关键的环节之一,它会直接对飞行姿态控制以及安全性造成影响。掌握正确舵机安装方法,也就是从选位开始,继而进行固定,开展连杆调试,如此这般,不管是首次组装者还是经验丰富的飞手,都能够有效规避舵面抖动、回中不准、空中失控等常见问题。本文凭借大量实操案例支撑,给出一套经过验证的标准化安装流程,以此确保舵机能够发挥出最佳性能。
第一步是安装舵机,要确认是舵机型号,与对应舵面相匹配,这对应舵面有副翼、升降舵、方向舵、襟翼。常见固定翼无人机的舵机,可分为两类,一类是标准舵机,重量在40g以上,另一类是微型舵机伟创动力舵机,重量是9到20g,其扭矩需求,是由舵面面积以及飞行速度来决定的。
实操建议:
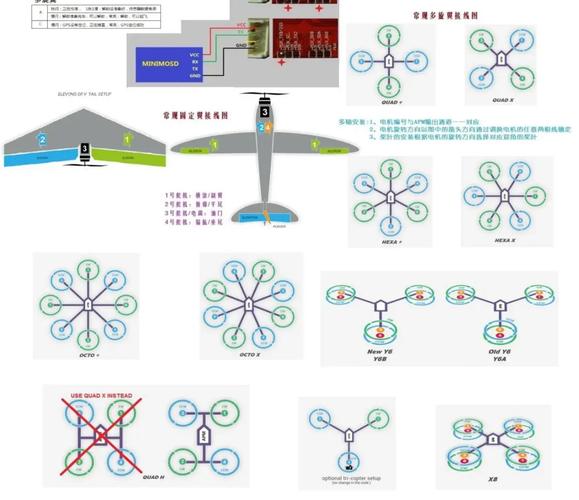
副翼舵机:一般安装在机翼中部或靠近翼根处,左右对称布置。
升降舵舵机:通常置于机身尾部或靠近重心位置。
方向舵舵机:与升降舵类似,多位于机身尾部垂直尾翼下方。
常见的案例呈现为,有一位飞手,在组装一架翼展为1.6米的练习机之际,错误地把副翼舵机安放在机翼的外侧部位,进而致使舵面力矩变得过大,并且舵机因为过热而被烧毁掉。而正确的做法是,要靠近翼根进行安装,接着缩短连杆的长度,以此来减少负载。
舵机的安装,要做到牢固,与此同时,要防止出现过度压迫外壳的情况,以免致使外壳发生变形,不然,就会造成内部齿轮被卡死。
标准固定步骤:
1. 开始定位开孔操作,借助舵机自身所带的安装耳片,于安装板之上标记出螺丝孔的位置,在此建议,要使用电钻,且电钻装上2.5mm 3mm的钻头之后进行预钻孔,以此来防止木板或者塑料板出现开裂的情况!
2. 硅橡胶减震垫放置于舵机底部以及安装板之间,厚度为一至两毫米,用于安装减震垫,它可吸收高频振动,还要确保防止舵机电位器磨损,进而延长使用寿命。
3. 把自攻螺丝拧进去,选用2×10mm或者2.5×12mm的自攻螺丝(按照安装板的材质来挑选)。关键之处在于,螺丝拧到能够让舵机固定住不会晃动就行,千万不要拧得太紧致使耳片发生变形或者螺丝出现滑丝的情况。通过手感来判断,当螺丝完全沉入到耳片之后,再拧1/8圈就停下来。
毛病存在: 不运用减震垫径直生硬地固定,飞行一阵子之后舵机显现出虚位或者抖动。添加上减震垫之后,百分之九十超水准以及的振动传导问题能够被解决。
出现舵面偏置且无法回中这种状况,其主要原因在于舵臂也就是摇臂的安装角度出现了错误。
正确操作流程:
1. 把舵机连接到接收机相匹配的通道,把遥控器所有微调都调整到零,把摇杆放置在中立的位置伟创动力,给接收机接通电源,舵机就会自动转动到机械的中央点。
2. 先是安装舵臂,在安装舵臂的时候要把舵臂朝着尽可能接近垂直舵机侧面方向套入输出齿先,要是此刻存在齿位偏差较大的情况,偏差超过15度的这种状况,那就不要强行压入舵臂了,而是要运用遥控器的“中立位微调”功能去进行处理,通过这个使舵臂调整至垂直状态,还有一个原则,需保证舵臂与舵机侧边夹角维持在90±5度。
3. 先把舵机自带的M2或者M2.5圆头螺丝用于固定舵臂,在进行这个操作时要涂抹少量被称作低强度类型像型号为 243那般的螺丝胶,目的是防止在飞行这种工况里出现松动情况,涂抹的螺丝胶用量需要以覆盖前面3圈螺纹算是适当的,因为假如用量超过适宜量就会渗入那个轴承。
有这样一个案例可以说明,有某一个用户,在安装升降舵舵机的时候,没有进行上电回中操作而直接安装舵臂,结果致使舵面在摇杆处于中立状态时就已经向上偏转了5度,在飞行过程当中需要持续地推下操作杆来保持平飞状态,最终因为舵机持续处于负载状态而过热导致失控,在重新按照流程进行校准之后问题得到了解决。
钢板绳索、碳素纤维杆或者钢丝制成的连杆,它们的长短尺寸,以及相互连接的方法形式,会直接对舵面做出反应的精准程度产生影响。
连杆调整步骤:
1. 将舵臂放置于中立位,把舵面horn(舵角)也置于中立位,测量这两者两连接点之间的直线距离,并且预留5 8mm螺纹调节余量。
2. 打造连杆组合:运用“Z”型弯头或者球头扣(推荐运用球头扣,其虚位更为微小)。把球头扣拧进至碳纤杆或者钢制连杆的两端之处,确保两端螺纹拧入的深度保持一致(不少于8mm)。
3. 相连:首要是利用球头钳用力按压,把球头扣嵌入舵臂之球头,接着去连接舵面horn,要保证连杆两端球头扣能够灵活摆动,不滞涩不卡顿,毫无阻碍地活动。
4. 精微调节方面,借助旋转那有球头扣螺纹的连杆,以此促使有效长度产生相应改变 ,会凭借使用量角器或者目视这得以依循的参酌方式 ,让舵面于处于中立位置之际 ,能够恰到好处地和机翼或者尾翼的表面保持齐平状态。当调节操作完成之后 ,运用M3螺母拧紧球头扣的根部。
重要查验之项:以手去拨动舵面,去体会自舵面起始直至舵机的一整个传动链条是否顺滑。任何出现卡滞的情形均会致使舵机电流增大,进而烧毁驱动电路。
在众多固定翼无人机飞控之中(像、这类),或者遥控器那里,能够对舵机行程量进行设置。当把机械部分安装好之后,在软件里一定要对最大舵面偏角加以限制,以此来防止舵机撞到东西或者把舵面拉坏。
标准参数:
副翼行程,其范围是从正十五度到负十五度,再到正二十度到负二十度,此范围内遥控器对应着行程量从百分之一百到百分之一百二十。
升降舵行程:±12°至±15°
方向舵行程:±20°至±25°
操作步骤:
1. 遥控器跟飞控相连,于“舵机行程”菜单里头,把副翼、升降舵以及方向舵的End Point(终点)设置成默认的100%。
2. 将摇杆打到满格状态,去观察舵面的偏角情况。按照每次增加5%的幅度来逐步提升行程值,一直到达所需达到的最大偏角为止(假设副翼为20度这种情况)。需要注意的是:在这个时候要检查舵臂是不是碰到了任何结构或者舵面horn是不是已经拉伸到极限,如果出现了机械干涉的状况,那就需要减小行程。
3. 所设定的那个行程值,一般是处在80%至120%这个范围之中。把每个舵面的行程值做下记录。
有这样一个案例,有一架竞速机,因为没有设置行程限位,在高速飞行的时候,副翼舵面发生了偏转,而且这种偏转所形成的角度,超过了25度,正是,导致舵臂撞到了机翼蒙皮,进而使得舵面被卡死,最终造成了坠机的结果。在设置了限位之后,便不存在这样的风险了。
完成全部安装后,执行以下验证,确认舵机安装合格。
如果上述任何一项不达标,返回到对应步骤重新调整。
重点看法是,固定翼无人机舵机安装达成成功的关键之处在于这三点,其一为机械中立的精准校准,其二是减震与防松的细微处理,其三是软件行程的限位保护。任何一个环节缺少都会致使飞行性能降低甚至引发事故。
行动建议:
1. 即刻去检查你当下正在运用或者等待进行组装的无人机,核实全部的舵机都已装上了减震垫,螺丝已涂抹了螺丝胶。
2. 下次起飞前,在地面完成第七步的三项功能验证,切勿带病升空。
3. 制造安装记录表格,记下每一架飞机的舵机型号,记下每一架飞机的行程数值,记下每一架飞机的安装日期,以此方便后续来进行故障追溯。
根据本指南一步步去操作,你能够保证舵机在环境温度处于零下十摄氏度到五十摄氏度时、面对着各种飞行姿态的状况下稳定地进行输出,从而使得固定翼无人机切实做到真正意义上的“指哪打哪”。























