



























TECHNICAL SUPPORT

发布时间: 2026-05-06
舵机是一种执行器,简单来讲,它能够精确控制旋转的角度。其内部有电机、齿轮组以及控制电路,它们协同进行工作,把输入的电信号转化成特定角度的机械方面的输出。当您给舵机发送一个指令,可以是“转到90度位置”这样的信息,它会自主驱动电机,并且通过内部的反馈系统持续核实当下的位置,一直到精准地停在90度的地方,并保持在该角度以抵抗外力。
知晓舵机的构成以及其工作的原理,关键之处在于把控它的闭环控制系统,它非但能够去执行指令,并且还能够自行开展检查进而进行修正,借此到达比平常电机要高许多的控制精准度,您于日常之内所看见的机器人关节灵活地转动、机械臂精准地抓取,均是依靠舵机的此项能力。
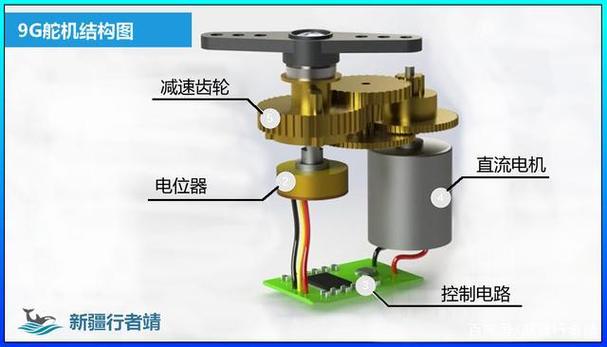
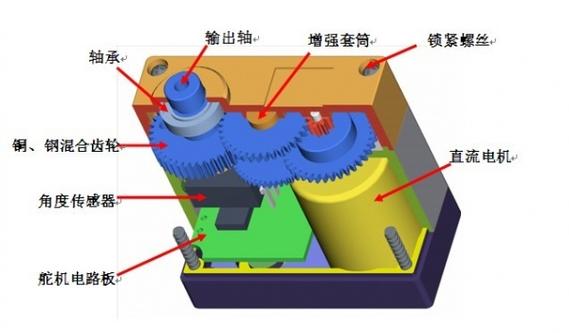
一个标准舵机由以下四个核心部件组成,缺一不可:
1. 掌管舵机动力的核心部件,是直流电机。 它依据控制电路给出的指令,以产生旋转运动。 该电机具备转速高、扭矩小的特性,要搭配减速器方可输出大力矩。
2. 齿轮减速组,是由多级齿轮而成,这些多级齿轮,通常是由金属或者工程塑料制作而成。它有两个作用,其一,是把直流电机的高速旋转,也就是每分钟数千转的那种,大幅度降低,变为舵机输出轴的低速旋转伟创动力,通常指的是小于1转/秒的那种;其二,是把电机的小力矩进行放大,使得舵机有足够的力去驱动负载。
3. 用以控制的电路板,是舵机的那个被称作“大脑”的部分。它会去接收源自外部犹如单片机那样的控制器所给出的信号,进而驱动电机开始运转,同时还会对反馈回来的信息予以处理,最终做出精准的位置闭环控制。
4. 安装在舵机末级齿轮上的位置反馈元件,一般是电位器,它的阻值会随着输出轴角度的变化而呈线性改变伟创动力舵机,控制电路凭借读取电位器的阻值,从而实时获取输出轴的当前位置。
事实所依凭之内容为,上述提及之结构乃是一切标准航模以及机器人舵机所共有的通用设计,与之相关的技术参数能够参照《GB/T 38068 2019舵机通用技术规范》以及行业主流的工程教材。
舵机达成精准角度操控的要点在于其内部存在的闭环控制系统,整个阶段情形如下:
第1步:接收指令信号
舵机接收由外部控制器发出的脉冲宽度调制也就是PWM信号,对于标准舵机而言,指令信号的周期被固定为20ms,借助改变脉冲宽度,通常是0.5ms 2.5ms,以此来对应不同的目标角度,例如:
脉冲宽度 0.5ms → 对应 0°
脉冲宽度 1.5ms → 对应 90°(中位)
脉冲宽度 2.5ms → 对应 180°
第2步:信号解码与比较
管控电路板之上的解码芯片会把PWM信号换算成为目标角度位置值,与此同时,电路会读取位置反馈电位器的当下阻值,将其换算成当前实际角度值,随后,电路会计算差值,差量等于目标位置减去当前位置。
第3步:驱动电机修正
倘若差量呈现为正的情况(此情形下目标角度大于当前角度),那么控制电路会使正向驱动电路处于导通状态,进而电机做正方向转动,输出轴朝着目标方向进行转动。
要是差量呈现为负的情况,也就是当目标角度小于当前的角度时,让控制电路去导通反向驱动电路,使得电机进行反转,进而让输出轴出现回退的状况。
要是差量呈现为零这种情况(也就是已经抵达目标角度),那么控制电路会切断电机驱动电流,进而电机停止运转,最终输出轴维持静止状态。
第4步:动态维持
即便处于目标角度,要是有外力企图扭转输出轴,电位器就会觉察到全新的差值,控制电路便立即再度驱动电机反向修正,进而产生保持扭矩。这便是舵机哪怕断电时,用手强行拧动也能感觉到阻力的缘由。
重点结论是:舵机从本质上来说是一个“自动控制角度跟随的系统”。它对于电机转动的快或者慢并不关注,仅仅在意“输出轴在当下是不是处于指令所要求的角度之上”,并且借助反复出现的“检测 比较 驱动”这种循环去实现这一目的。
场景是,有一个平常的5V舵机,它连接于机器人的手臂关节处。您期望手臂从处于水平的位置,也就是0°,向上抬升至垂直向上的状态,此状态为90°。
1. 主控板会依据您发出的指令,向机器人发送PWM信号,该信号的脉冲宽度设定为由您告知的1.5ms,此脉冲宽度所代表的目标角度是您所说的“90°”。
2. 舵机接收指令,之后进行自检,控制电路解码进而得出“去90°位置”,这时电位器读数是0°,也就是当前水平位置,电路做出判定,并得出目标和当前不一样,差量为+90°。
3. 舵机开展执行动作,控制电路促使直流电机进行正转,经过减速齿轮组将扭矩予以放大,输出轴跟手臂一块儿将其抬起。
4. 动态追踪以及停止:于抬起这个过程当中,电位器的读数持续发生变化(从0°开始,朝着30°变化,再到60°变化,如此类推)。每一回出现变化的时候,电路都会再次去计算差量。当手臂抵达90°的时候,电位器读数转变为90°,差量变为零,电路即刻停止为电机供电。手臂精确地停留在90°这个位置上并且维持不动。
5. 面对抗外力干扰情况:要是存在他人朝着下方用力按压手臂,致使输出轴被按压至85°。此时电位器读数会瞬间转变为85°,电路检测出的差量是+5°,随即会立刻自动重新驱动电机朝着正转方向运行,把手臂推回到90°的位置。
Q1:舵机为什么会抖动?
常见原因存在两个,其一为供电不足,电机启动的瞬间电流极大,可达1 2A,要是电源没办法供给充足的瞬时电流,那控制电路会因为电压跌落而持续复位,其是运用具备足够功率的独立稳压电源,像5V/2A以上的那种,其二是信号干扰,PWM信号线过长或者靠近强电线,而致使信号不稳定,其是缩短信号线的长度或者采用屏蔽线。
Q2:连续旋转舵机和标准舵机有什么区别?
在舵机领域中,A提到,有一种被称作标准舵机的装置,是具备位置反馈功能的,它能够精确地停止于0°到180°这个范围之内的任意一个角度位置,常常被应用于机械臂关节以及摄像头云台等方面。再来看看连续旋转舵机,它去掉了位置反馈闭环这一结构,唯独保留了速度控制一项,然而它是没有办法停止在特定角度位置的,仅仅能够去控制正反转以及转速,从某种程度上看就类似于一个带有减速功能的直流电机,通常是被运用在车轮驱动之处。它们在结构方面存在差异,具体表现为:连续旋转舵机的电位器处于被固定在中点的状态,并且还去掉了角度限位装置。
Q3:如何判断舵机好坏?
就如下这样,按照顺序去检查这三个方面,,是外观与齿轮这一方面,要看看晃动的时候是不是存在碎屑声呀这个碎屑声有可能是扫齿导致的,还要手动转动输出轴,看看它滑不滑顺哒也就是不能有卡滞的情况存在;然后,是供电测试这一方面,接上5V电源,听听内部有没有异常的啸叫。3)进行信号测试,通过信号发生器或者单片机来发送时长为1.5ms的脉冲,此脉冲为中位信号,要是舵机不在中位停止而是出现严重抖动的情况,那么控制电路或者反馈元件就有可能损坏。
它的工作原理,是一种持续着的闭环控制系统,会持续不断地读取当下位置,将此与PWM信号所给定的目标位置去做对比,依据差值驱动电机来进行修正,一直到精确地到达并且维持住该角度。
接下来您可以做的三件事:
1. 手动进行验证,要是您手头拥有一个标准舵机,像SG90或者MG995这种,那就准备一个5V电源和一个或者PWM信号发生器;传送1.5ms周期的PWM信号,去观察舵机是不是精准地回到90°中位;把脉宽改变到1ms和2ms,以此来验证0°和180°位置。
2. 进入到进阶学习阶段,要特别着重去深入探究且关注“PID控制”以及并“FOC控制”,以上这些内容乃是达成高精度、营造大扭矩的智能舵机得以成功实现能够平稳顺滑运动的最为核心关键的技术所在。
3. 注意安全提醒,操作金属齿轮舵机之际,要留意手指安全状况。大扭矩舵机,像那种20kg·cm以上的,在满负荷工作之时,其力极大无比,存在造成夹伤的可能性。























