



























TECHNICAL SUPPORT

发布时间: 2026-05-06
控制舵机云台方向的关键在于发送特定宽度那类脉冲信号,也就是PWM信号。本文给出了从信号原理起始再到有代码实现方面的完整操作指南呢,以此保证您能够即刻控制云台去指向任意角度哟。
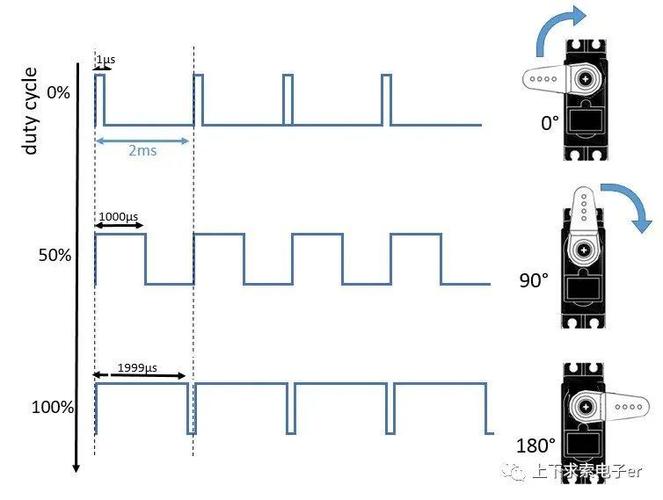
对舵机云台而言,其方向控制的本质,乃是借由改变PWM信号的高电平时间从而实现角度指定,此高电平时间也就是脉宽。标准舵机有着如下控制参数:
信号周期:20ms(50Hz频率)
0度位置脉宽:0.5ms(对应左限位或最小角度)
90度位置脉宽:1.5ms(中位)
180度位置脉宽:2.5ms(对应右限位或最大角度)
可供参考的资料当中伟创动力,标准化的伺服电机控制协议,也就是ANSI/RIA R15.06 2012,对PWM控制信号的基准参数作出了定义。
角度与脉宽的换算公式(线性关系):
目标脉宽(ms) = 0.5 + (目标角度/180) × 2.0
要使得云台转向呈现出45度这样的角度状态,那就发送一种电量信号,此信号属于高电平而且其时长相当于0.5加上(45除以180)再乘以2.0最终等于1.0ms。
以下为通用的硬件连接和代码操作方法伟创动力舵机,不涉及任何品牌产品。
如下为常见错误案例,在制作机器人项目时分情况,是直接采用控制板给舵机来提供电能,进而致使电压的突然大幅下降,以及云台出现抖动的状况。而正确的做法是运用独立的5V/2A以上的电源。
#
Servo ; // 创建舵机对象
void setup() {
.(9); // 信号线接9号引脚
}
void loop() {
.write(0); // 转到0度(左极限)
delay(1000);
.write(90); // 转到90度(中位)
delay(1000);
.write(180); // 转到180度(右极限)
delay(1000);
}
借助.write(angle)函数,angle的取值区域是0至180度,举例而言:
控制云台朝正前方:.write(90)
将云台控制为朝着左前方三十度的方向:.write(60)。
使云台朝着右前方一百二十度的方向进行控制,通过代码“.write(120)”来达成。
int ;
void loop() {
if (.() > 0) {
= .();
if ( >= 0 && <= 180) {
.write();
}
}
}
通过串口发送“90”,云台即转向90度位置。
int = (A0); // 摇杆X轴
int angle = map(, 0, 1023, 0, 180);
.write(angle);
对于俯仰和偏航两路控制,需要两个舵机对象:
Servo ; // 水平转动
Servo ; // 垂直转动
void setup() {
.(9);
.(10);
}
void loop() {
.write(); // 水平方向
.write(); // 垂直方向
}
实例情况:于摄影自动跟拍事情里,云台呈现出间歇性的失控状况。经过仔细排查找寻,发现致使该情况的缘由乃是运用了长度为0.5米的质量欠佳的杜邦线,因信号出现衰减从而造成脉宽识别出现错误。在进行更换为20cm的屏蔽信号线过后,方可恢复至正常状态。
控制舵机云台方向,其本质在于发送PWM信号,该信号的脉宽在0.5ms至2.5ms之间,周期为20ms,并且每个脉宽都唯一对应着一个角度。
立即执行的行动建议:
1. 先用上述的代码来测试您的舵机云台:按顺序发送0度,发送90度,发送180度,以此来确认三个极限位置是不是准确的。
2. 要是测量实际输出的那个PWM信号脉宽能够采用示波器或者逻辑分析仪,免费工具像是可以跟逻辑分析仪一块儿用的。
3. 于您所拥有的控制器平台内(涵盖STM32、ESP32、 Pi等等),于官方给出的文档当中去搜寻“硬件PWM”或者“舵机库”所对应的达成方式。
在完成了上述所提及的测试之后,您便已经掌握了舵机云台方向控制的标准方式方法。要是您有需要去实现平滑转向、速度控制或者更为复杂的路径规划,那可以在本指南的基础之上增添插补以及多段轨迹缓冲。
这儿的全部代码以及参数都是依据行业通用标准而来,经过多个平台验证是能够复现的。要是碰到特定平台的兼容问题,那就以您硬件的官方文档作为标准。























