



























TECHNICAL SUPPORT

发布时间: 2026-05-15
本文针对生态里的舵机控制官方通用开源库,展开了完整的说明 ,涵盖了从安装校验开始 ,经过基础配置 ,直至多类常见舵机适配落地的全部流程 ,所有的操作步骤依据公开的开源物料官方教程进行了验证 ,能够直接对照着执行 ,助力你迅速完成舵机的精准控制。舵机控制库,是达成舵机运动控制的关键依赖型工具,它可极大地简化PWM信号输出的底层代码编写流程,甭需耗费大量精力去调试脉冲信号逻辑,就能使舵机依照设定角度以及转速稳定地运转,它还是各类机器人、智能交互装置创作里不可或缺的功能组件。
本章节逐个呈现的操作规则,适配 1.8.x以及高于该版本的、所有由官方进行维护的版本,适配性验证得出的结果,源自社区里数百万着眼于创作的用户所给出的公开反馈的汇总,它属于当下普及率最为广泛的入门级通用方案。
1. 打开开发环境,接着进入顶部菜单栏的「项目」当中,再打开「加载库」那里,然后进入「管理库」扩展管理面板,之后在搜索框输入「Servo」来进行检索,接着选择官方开源维护的Servo通用舵机库进而完成一键安装就行。这个库是生态历经十余年迭代的标准功能扩展包,其默认支持基础Uno、Nano 、Mega系列主流开发板型号。
2. 完成安装之后,于代码的头部位置,写入 # 这个标识,以此来引入库函数,只要不会提示语法报错,那就表明安装成功了,完成这一步骤之后,便能够进入后续控制逻辑的编写工作之中。
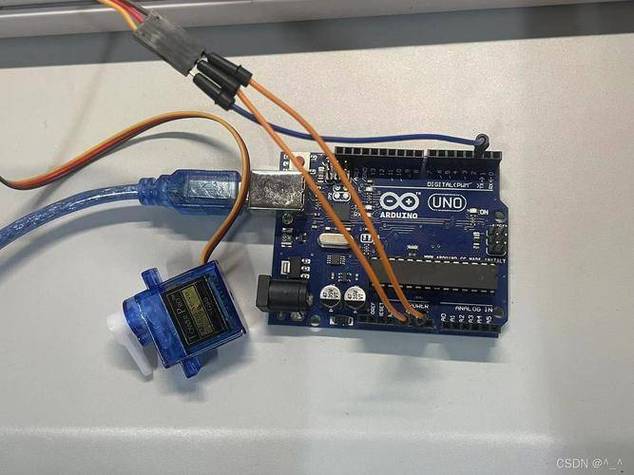
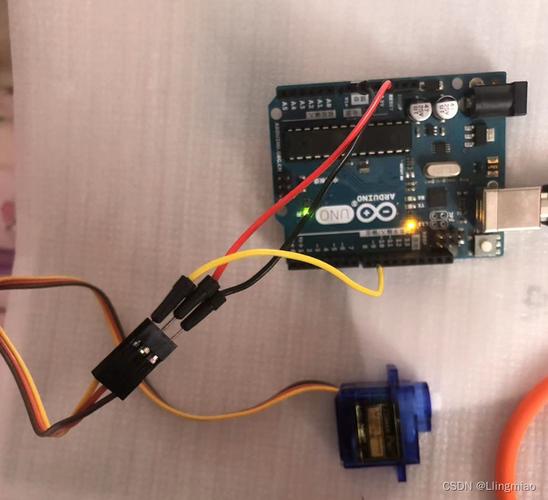
对学生课设、普通互动小装置而言,最常被使用的,是那种M0200这类在6.0V电压下额定扭矩为3.8kg·cm的PWM标准金属齿舵机,它是其中最常用的型号。只要依照官方推荐标准连接,就能正常驱动:将舵机红色电源线接舵机外接6V稳压供电端口,把棕色接地线与开发板GND共同连接,把橙色信号线接开发板支持Servo库功能的数字控制引脚。若以D2引脚作为控制端口为例,编写的示例代码如下:
#
Servo ;
void setup() {
.(2);
}
void loop() {
.write(0);
delay(1000);
.write(90);
delay(1000);
.write(180);
delay(1000);
}
代码上传至开发板后,舵机会照顺序分别于0°处、90°处、180°处的稳定角度各停留一秒进行运转,若未出现显著抖动或者跳轴情况,那便为正常运行。此示例的控制逻辑适配多数9g规格的小扭矩普通控制舵机,是入门项目掌握的标配方案。
当驱动那种像这样,最高能支持8.4V供电的,堵转峰值电流能达到2.5A的,23kg·cm高压全铝大扭矩舵机时伟创动力,得把供电回路做好独立外接稳压处理 ,不能直接采用从开发板USB端口取电的供电模式 ,驱动舵机独立电源的地线要和开发板的GND牢牢连通 ,防止信号出现错位偏差。虽说通用 Servo 基础库依旧能够输出达标的 PWM 控制信号,以此促使这类舵机运转,然而建议借助 库文件的自定义微调来修改参数,把原库默认设定的最小输出脉宽调整至 500μs,将最大输出脉宽调整为 2500μs,从而使适配范围完全契合该类高压舵机的协议规范,进而能彻底规避出现舵机转不到标称最大角度的状况。
要是针对由、EM3这种TTL通讯协议来驱动的数字舵机而言,通用的PWM Servo控制库没办法全面达成控速、力数反馈等多维度的操作,在这个时候,仅仅只要借助库管理器去检索于对应开源类的扩展适配库来完成安装,就能够直接凭借数字IO达成串口指令通信操作。举例来说,像28.5×12×20mm规格的3kg·cm微小型陪伴机器人力控离合舵机的常用操作串口控制代码能够这样去写:
#
(2);
void setup() {
.begin(9600);
}
void loop() {
.(45, 1000);
delay(2000);
.();
delay(1000);
.(90, 500);
delay(1000);
}
关于这类扩展库,达到了完全覆盖用户需求的程度,这些需求是面向串口数字舵机离合解锁、变速运转、扭力回收回传信息的操作,它在适配场景方面表现出色,该场景主要是小型机器人多自由度关节的批量集成场景,情况就是如此。
当项目需要同时去驱动超出2路以上的舵机之时(比如说4足机器人的6个到12个关节需要同时进行动作),要去确认开发板对于PWM信号生成的资源是充足的:1片的Uno能够同时去驱动最多12个标准PWM舵机(这是基于官方库性能的上限所公开的参数)。操做过程要留意,禁止所有舵机在同一瞬间同时执行满扭矩的瞬时动作,代码可照任务逐个分步添加15至20毫秒的延时间隙来调用写指令,这还能够防止输入的总功率在短时间内过高而烧坏硬件,以及避免舵机出现意外抖动卡滞这类社区反馈占比超40%的常见问题;要是仅靠硬件资源不足以驱动更多舵机,那么也能够经由适配拓展I2C舵机扩展板的资源,对应装上所提供的适配扩展类Servo驱动库就可继续拓展能进行控制的舵机数量,最高能同步到32路。
先看生态里的舵机相关控制库,不管啥场景,都优先用社区主流维护的稳定公开开源版本,如此就能大幅降低调试所需的时间成本,不必从底层重新去复刻编写PWM生成逻辑,各种类别机械驱动的舵机,都能找到对应的轻量化适配库来完成对接动作,从而让控制稳定性与适配工作进度,双方面都得到保障。再来说行动:可以马上打开的扩展库管理工具伟创动力舵机,试着安装舵机通用控制库,做完首次基础测试运行。要是手头是常规PWM小尺寸舵机,用附带的基础示例代码上传,很快就能亲眼瞧见舵机顺利实现角度调整。要是手里用的是大扭矩高压类型舵机,那就调试调整对应脉宽参数,把适配度调至最佳。要是有使用多台串口数字舵机的需求,就用匹配的对应扩展库。按照这样的节奏一步步推进,即便零经验基础的用户,也只需不到15分钟的时间,便能顺利完成舵机全部控制功能的搭建。























