



























TECHNICAL SUPPORT

发布时间: 2026-05-15
将舵机所产生的控制信号,当作驱动舵机从而达成精确角度定位这种关键核心指令,于航模爱好者、学生创客以及自动化技术人员构建起到运动控制作用的项目进程里,是他们当中最为频繁接触到时存在的核心技术环节。
下文会全面地、深入地围绕舵机控制信号的相关实用规则,展开所有内容,还能围绕其操作方法,展开所有内容,也会围绕故障误区,展开所有内容,这些内容可覆盖中小创作型项目里绝大多数的通用场景需求,并且所有参数均严格遵循国际通用的标准模拟舵机控制规范。
通过符合通用国际标准要求这样的模拟舵机,其控制信号一致是周期为20ms也就是频率为50Hz的脉宽调制信号形态,核心有效时长处于0.5ms至2.5ms这个范围之间,可直接参考下表的是最常见的180度行程标准舵机的对应规则:
在实际当中,绝大多数通用场景里所常用的180度舵机,其工厂默认的标准设置是,中间点为1.5ms脉宽,并且整体偏差不会超过±0.05ms,普通爱好者将其用在航模小车、机械臂项目中时,无需额外校准就能够直接使用,只要控制信号完全匹配该时间窗口,舵机就会精准锁定对应的输出角度位置。
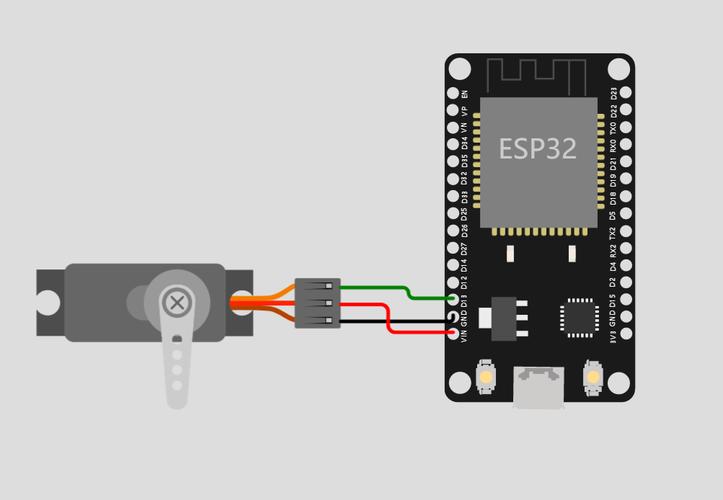
一种被称作通用标准舵机的装置,一般会自身携带三根用于连接的线,其中有一根线是专门用来传输电力的电源线,此电源线所对应的标准工作电压范围是从4.8V到6V,它能够稳定持续地递送舵机正常运行所 的电力,从而保证舵机可以稳定运行;另外一根线是地线,它会发挥保障电路稳定性使其平稳且安全的作用;除此之外还有一根线是控制信号输入线。在这三根线当中,控制信号端口具备特定的使用功能,它是专门设计用来接收从单片机以及航模接收器传送出来的PWM伺服信号的。该控制信号端口的电平标准是3.3V至5V能兼容了,这表明绝大多数常见的开发板送出的IO口信号,能够直接跟它连接来进行控制了,这样就能实现对舵机精准且有效的操控了。这意味着STM32学习板送出的IO口信号可以直接与其连接开展控制了;然后就能达成对舵机精准有效的操控了。
于那些不存在 PWM 专用外设的普通微型控制板来讲,实在不必增添额外的硬件电路。能够直接运用普通 IO 口,通过软件定时这种方式来模拟出周期为 20ms 的脉宽信号。这样做之后,同样是能够达成舵机的全部角度调速控制功能的。借助常见的电子元件,就能够构建出一个得以完全运行的舵机控制系统,不用采购专用驱动模块,这是完全适配了所有低成本趣味演示以及课程实验开发场景的需求的。
于实际应用里,这般基于普通微型控制板的舵机控制方案富于显著优势,它不但规避了因增添额外硬件电路兴许引发的复杂性以及成本提高,还借由软件模拟的办法灵活达成了舵机控制功能,常见电子元件的运用致使搭建进程更为便利,无需依靠专用驱动模块进一步削减了成本伟创动力,不管是在趣味演示中呈现舵机的灵活转动,还是在课程实验开发中深入探究舵机控制原理,该方案皆能完美契合需求,为相关场景给予了高效且经济的解决办法。
多达90%以上的普通舵机,出现堵转、抖舵以及定位偏移失控等故障,本质上的问题,全都出现在控制信号那一侧,并非舵机自身存在损坏故障:

1. 诸多初学者时常犯下的差错是,将软件PWM的周期,错当成了普通灯光PWM的1kHz频率特性,未遵照舵机专用周期准则,一旦信号周期持续超出30ms以上伟创动力舵机,舵机就会因识别失效而致使随机颤动胡乱转动。
2. 在单片机采用3.3V工作电平的情况下,当传输舵机的控制信号线距离超过50厘米时,就会因为信号电平幅值不足而导致解析失败,而在实际操作里,只要调换带有信号绝缘屏蔽层的线材就能将失控情形完全解决。
3. 当接连给控制端口不断电,持续输入小于0.3ms或者大于2.7ms的信号时,会有极窄或极宽信号输出,这会超出舵机的物理齿轮最大旋转行程,进而强制顶死内部齿轮,使其持续长时间堵转发热,最终导致内部电机烧毁,所以在项目测试时要提前把信号脉宽限制在安全的0.5至2.5ms区间内,做好提前保护。
舵机的每一个控制信号核心规则,一直都维持着统一状态,不会出现任何改变:只要保证输出的是那种周期严格保持在20ms、脉宽对应的要求符合0.5至2.5ms区间的PWM脉冲信号,就能够驱使常规舵机达成精准的转角控制。在你此刻着手开启关乎舵机的全新项目调试工作之际,不要急忙去连接机械结构,能够先为舵机单独烧录一段自0.5ms起至2.5ms按每分钟逐步递增脉宽的基础测试代码来进行验证,逐个去排查每一个角度点可否顺利完成整个行程,之后再去安装实际负载。整套调试工作所需的时间不会超出10分钟,全过程采用最为妥当的操作方式,便能够完全避开绝大多数因人为而引发的舵机信号失控意外。
进行舵机调试之际,照着上述步骤去操作极为关键。其一,要明确舵机控制信号的核心规则保持不变,这给后续调试奠定了稳定根基。其二,凭借确保输出特定的PWM脉冲信号,能够精准操控舵机转角。其三,在新项目调试起始阶段,别着急去连接机械结构,先开展单独的基础测试代码验证,可有效排查舵机在各个角度点的运行状况。先等待确认不存在错误之后,再去安装实际的负载,这样一种严谨的调试流程,能够大幅度降低因为人为因素而致使舵机信号失去控制出现意外的概率,保证调试工作高效且顺利地完成,并且整个过程简单明了,不会出现复杂繁琐的情形。























