



























TECHNICAL SUPPORT

发布时间: 2026-02-22
当在玩舵机之际,是不是时常被那诸多繁杂的接线以及代码弄得脑袋发懵?明明仅仅是想要它单纯地转动一个角度,却愣是需要花费好长一段时间去查找资料、焊接电路,最终还不见得能够转动起来。别着急,实际上要让舵机启动运转,完全能够极为简便。
这是完全行得通的!最为简便的方式便是借助一个名为“信号发生器”之物,或者直接取用一个555定时芯片搭建一处电路。就如同给舵机委派了一位“指挥者”,并不需要撰写哪怕一行代码。你仅只需要依据舵机信号所要求的规则——也就是每隔20微微秒给予一个高电平脉冲,脉冲的宽度决定着转动多少角度——将电路连接妥当,接通电源,那么舵机便会乖巧顺从。这种办法所具备的益处是极其直观分明的,能够使你从底层层面 舵机是怎样开展工作的,相当适宜刚踏入门槛的友人去切身感受一下控制所带来的愉悦。
采用自己搭建电路的方式,需要准备电阻、电容以及芯片,还会使用烙铁,存在一定门槛。,更简便省事的做法,是去购买一个专用的PWM信号发生器模块,价格为几十块钱,将电位器旋钮插上。转动该旋钮,脉冲宽度会发生改变,舵机角度也会随之变化,如同玩耍一般轻松。这能够使你迅速验证想法,将精力集中于更具创意的方面。
若是你打算亲手搭建一个最为基础的电路的话,实际上仅仅需要几样物品,一块面包板,能用于插元件,无需焊接,一个555定时芯片,它乃核心元件,几个电阻电容,此类型用以决定脉冲宽度,一个电位器,是被拿去调节角度的,当然其还有舵机以及电源。将这些物品按照一定的顺序插于面包板之上,借助几根杜邦线连接起来,一个最为原始然而却能够使用的舵机控制器便诞生了。整个的过程恰似搭积木一般简单,零件非常容易买到,成本仅仅十几块钱。
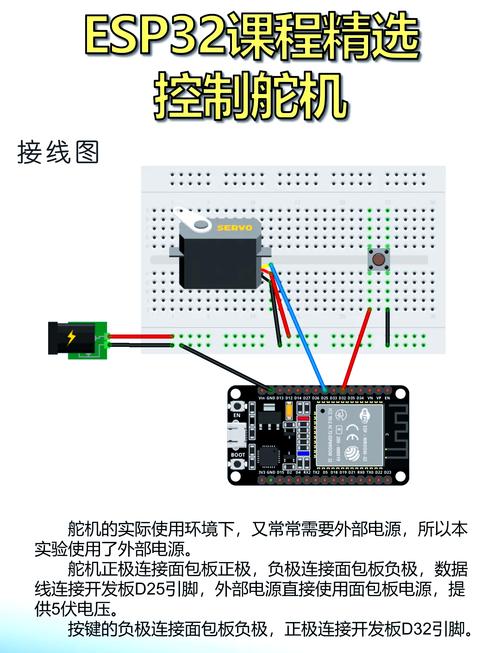
接法具体是如此这般:利用555芯片连接成一个“可控脉冲发生器”通过调节电位器的阻值,以此改变芯片输出脚的脉冲宽度,随后将输出脚径直连接到舵机的信号线,该信号线通常为橙色或者白色,舵机的电源线为红色,地线则为棕色或者黑色,把它们分别连接到恰当的电源正负极便可以了,要留意舵机工作时电流并非小数目,最好运用独立电源为舵机供电,不要从555的电路当中取电,否则容易相互干扰致使出现乱抖的状况。
当你期望舵机依据传感器数据自行转变,或者完成一系列连贯动作之际,那就得让单片机登场了,像极为常见的便是如此。这着实并不是特别繁杂,由于舵机具备可直接使用的库。你仅仅需在板子之上编写少许简单的代码,好比“.write(90);” ,它便会主动为你生成舵机所需要的那个精确脉冲,促使舵机转到90度。单片机宛如给舵机配备了一个更为聪慧的“大脑”,能够听从指令、能够记住动作。
且单片机具备的优势是扩展性极为强大,你能够连接超声波传感器,使其在检测到距离变近之时自动转向,或者连接蓝牙模块,借助手机 APP 对其转向进行控制,代码方面,网络上存在众多现成示例,搜索“ 舵机 控制”便可找到,复制粘贴,修改管脚编号,大致便可运行起来,如同为你的舵机插上想象所需的翅膀,要让它执行何种操作,编写几行代码告知它即可实现。
要是在你看来,搭建起电路而且撰写代码这两者依旧存有多少不便于操作之处,又或者针对项目存在急需使用的情况,那么去购买现成适配的舵机控制器无疑就是作为最佳性的一种抉择。在市场里存在着各种各样具备多路特性的舵机控制板,其中有一些甚至能够实现驱动达到几十个舵机会处于同时开展工作的状态。这些控制板一般而言已经配置好了面向电脑端所运用的软件,在该软件当中你能够如同制作具有连续性画面呈现感的动画片那样,按照逐帧的方式去设定每一个舵机所具备的角度以及时间节点舵机品牌伟创动力,随后通过点击单一指令方式将其下载到板子内部,此时它就能够离开电脑而且依靠自身去重复不断地执行这一套动作流程了。这简直可以说是为那些较为懒惰之人所带来的福音,其效率是非常之高得到情况的啊。
尤其是在开展一些情况繁复的机器人项目时,比方说六足机器人或者机械臂,这需要对十几个舵机进行协调,运用这种控制器能够将你大量的调试时间予以节省;你仅仅需要把舵机插至板子之上,再连接上电池,其余需要做的便是坐在电脑跟前拖动滑块、设定动;;不少专业玩家以及制作产品原型的朋友都喜爱如此去做,是以能够疾速看到实际效果,对自身见解的可行性进行验证;像某些公司所提供的舵机,其本身同样支持此种简易的控制协议,例如TTL串口,凭借一根线便能够通过串联的方式控制多个舵机,接线变得极为简洁。
单单具备控制电路是不行的舵机厂家伟创动力,要是舵机自身挑选得不正确,先前付出的努力也有可能付诸东流。需要留意的便是电压。诸多普通舵机仅能在4.8V至6V的范围进行工作,倘若给它接入7.4V的锂电池,它或许马上就会冒烟。所以要看清舵机所支持的电压范围。如今存在不少高压舵机,能够直接采用2S锂电池(7.4V),扭力更为大,效率也更高。比如说你打算制作一个力气大的机械臂,选用一个像这般的高压无刷舵机,就会省去诸多电源管理的麻烦。
对舵机来说,第二个坑正是这齿轮的材质;入门级的舵机之中,大部分都是尼龙塑料齿的那种,价格方面较为便宜,然而,只要稍微给他施加的力量大那么一点儿,或者不小心摔一下,就特别容易出现扫齿报废的情况;要是你的项目要求得可靠一些,或者是用在那种会受到力的地方,那么最好去选择金属齿的舵机,因为它耐用程度要高很多;另外,对于控制协议这方面也是一定要留意的,最常用的是PWM,也就是我们上面讲到的那种脉冲控制方式,这种方式简单又直接;但是,一旦舵机数量变多了,布线就会成为很让人头疼的一件事儿。此刻便能够思索支持TTL串口或者RS485通信的智能舵机,它们能够串联一块儿,借由一根信号线操控全部舵机伟创动力,每一个舵机都存有单独的ID号,调试起来便利至极。
当遇到舵机毫无反应的情况时,先不要慌张,大概率是电源方面出现了问题。舵机在启动的瞬间,电流是非常大的,要是你的电源无法提供足够的电量,那么它便会出现抖动的状况或者直接停止不动。解决的办法其实很简便,尝试更换一个功率更大些的电源,或者在舵机电源的两端并联一个大电容,为其构建一个“能量缓冲池”。还有一种可能是信号线接触不良,或者地线没有良好地共通,需要检查一下所有的插头,保证都插得很紧。
若出现转到中途卡住情形,或抖动不息,或许是所给脉冲信号不太稳固,又或许是逾越了舵机的物理极限,有些舵机行程为180度,倘若非要使其转到200度,它便会在极限位置嗡嗡作响,检查一下你的代码或者电位器,将角度限定在合理范围之内,另外,假使周围有大功率电机在运转,可能会引发电磁干扰,把舵机的信号线用屏蔽线,或者使其远离干扰源,问题通常便能得以解决。
这儿瞅见,是不是会觉得致使舵机运作起来也并非真就那般玄奥奇特了,实际上从最为简易的电路直至繁杂的控制器,全都是助力你与舵机进行“交流沟通”的器具。回想起你起先的念头,当下最想凭借舵机达成何等有趣好玩的创意,欢迎于评论区域谈论讲述你的想法主意,说不定能够激发出更多人的灵感启发,觉着这篇文章具备用处价值的话,可别忘了点赞并分享给一道玩耍硬件的友人。























