



























TECHNICAL SUPPORT

发布时间: 2026-02-23
那些玩舵机的朋友,你是否也常常碰到这样令人头疼的状况:舵机要怎样去改变其方向呢?
明明程序编写无误,舵机却是朝着相悖的方向转动;或者期望机械臂向左摆动舵机厂家伟创动力,它却偏偏向右行进。别着急,今日咱们就来谈论怎样轻松处理舵机的方向问题,使得你在调试产品之时少走冤枉路。
不少才开始接触舵机的友人,拿到手后的首个反应便是:径直通电去尝试一番。结果发觉舵机要么处于不动的状态,要么转动的方向全然不正确。
本就存在着一种较为通常的错误认知——舵机自身并不清楚要朝着何种方向使之转动。它仅仅是一个执行的部件,接收来自控制器发出的PWM信号。而此信号决定了舵机是转动到0度的位置、90度的位置还是180度的位置。
实际抵达之处与你所发指令位置间存在偏差,这在本质上致使方向出现“错误”。举例而言,你期望它转动至90度并让机械臂向前伸展,然而它却有可能将90度理解成向后收缩的位置。
倘若你所运用的是像这样的微控制器,那么调整方向实际上是颇为简单的。其关键之处在于对程序里映射的角度值予以修改。
比如说,你期望舵机从0度转变到180度,然而它实际上却是从180度转向0度,在这种状况下,你仅仅需要于代码里进行一个“反向映射”,要是你的原始指令为.write(angle),那么能够将其改成.write(180 angle)。
如此这般,即便你期望它转过90度,它实际所执行的难道就是转过90度么?算一算,180减去90等于90,哎,这不依旧是90度哪?且慢,此这般例子是不正确的。
就如此这般让我再次去举个例子:假定你的机械臂所具备的安装方式致使它呈现出“反向运行”的状况,也就是当你期望它转动到30度(朝着前方)的时候,可是它偏偏却转动到了150度(朝着后方)。那么,此时你就得运用180去减掉你本来打算设置的那个角度。也就是这样的情况:你心里想着设置为30度,实际上呢就要写.write(180 30) ,其结果就等于 .write(150) 。然而150度恰好就是它朝着后方转动的那个位置,可这样依然是不对的。
对于舵机响应方向与预期相反这一状况,我知晓问题所在之处。进一步确切来讲,要是舵机响应方向和你所期望的恰好相反,那么你就得构建起一种映射关系。假定你的控制涵盖范围是从0至180 ,正常的映射情况是:0度对应着位置A ,180度对应着位置B。若是出现了相反的情形,那就使得0度对应位置B ,180度对应位置A。代码的实现方式便是: = map(, 0, 180, 180, 0)。采用.write(),拿掉原本的指令,以此进行替代,如此这般,你期望它前往零度位置,它却会去到一百八十度位置,而此位置,正是你内心认为零度该抵达之处。
有的时候伟创动力,仅仅凭借编程是无法解决本质问题的,尤其是在你的机械结构对于空间存在严格要求那会儿。比如说,你要是打算制作一个超薄的机械手掌,标准舵机是插不进去的。
处于这个时候,去更换一个舵机型号或许便会轻易解决问题。在市面上存在着各种各样具备特殊性质的舵机型号,它们源于天然便在为不一样的应用场景而进行设计。
倘若你的产品空间呈现出狭长且高度受限的状况怎么办,那么扁舵机便成为。它将转轴以及主体制作得更为扁平,能够直接嵌入至薄型结构当中,安装方向自然而然地契合你的需求,无需借助额外复杂的连杆去改变运动方向。
拥有两头呈现输出轴这般形式的双出轴机器人舵机,于某些具备对称结构的机器人之上,像双足机器人的髋关节这种情况,使用双出轴舵机能够促使两侧的关节达成同步运动,不但将结构予以简化,还规避了因安装方向存在差异而致使的转向混乱这一问题。
除了对软件进行更改,以及将硬件予以更换之外,最为直接的办法实际上是针对你的机械结构作出调整,诸多所谓的“方向不对”,事实上乃是由安装方式所导致的。
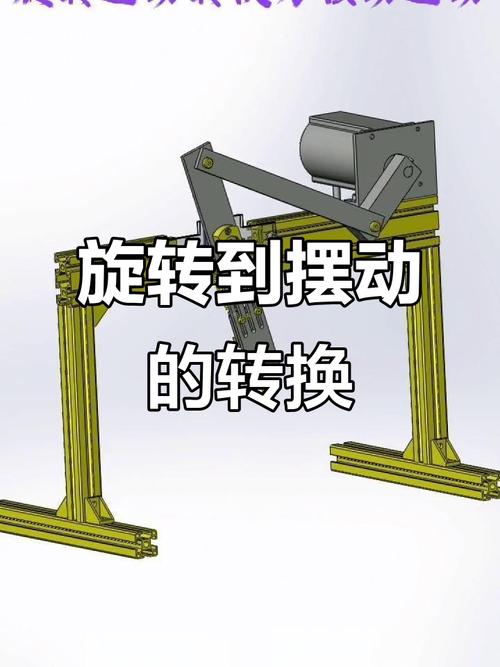
譬如,你期望一个摆臂从 A 点摆动至 B 点。要是你将舵机安装于支架的一侧,摆臂的运动轨迹或许就会是相反的。在这个时候,你能够尝试把舵机转动 180 度进行安装,或者重新规划一下舵机支架以及摆臂的连接点。
凭借改变支点,或者运用简单的连杆机构,能够将舵机输出的旋转运动,转变为你所需要的方向。这种手段虽说要多耗费些动手操作,然而一旦调整妥当,便是长久受益,并且不依赖任何程序,极为可靠。
当下,技术朝着愈发先进的方向发展演进,众多高端舵机已然自身携带方向设定功能。在对于投身产品创新领域的朋友们而言,这般情形能够节省下数量颇为可观的调试时间。
具备智能特性的这些舵机,一般能够借助一个位于外部的编程器进而设置参数。同时,也能够直接经由串口通信途径对参数予以相应设置。你能够在电脑所安装的软件当中,直接进行“反转方向”选项的勾选操作,随后将所做设置予以保存。
如此这般,舵机内部便会记住自身的转向逻辑,往后每一次上电时,它都会依照你所设定的反向去开展工作,你的主控程序全然无需做出任何修改,这对于批量生产以及后期维护而言,简直是极其便利的。
众多方法已被提及,实际上最为有效的办法乃是在事情尚未发生之时就加以防范。于设计阶段全面且充分地考量舵机的安装方向以及运动轨迹,如此能够助力你避开后续接踵而至的诸多麻烦。
处于绘制3D图这个阶段之时,不可以仅仅在于将舵机放置进去便视作完成。要开展导入舵机精准三维这一操作,之后去模拟摆臂的运动范畴。查看其在从0度朝着180度进行运动之际,是否会与其他零件产生触碰舵机品牌伟创动力,其运动方向到底是不是和你所设想的相契合。
要是察觉到会产生干涉现象,或者方向并非正道,于设计图上面调校一番舵机座的朝向,又或是略微变动一下周边零件的尺寸,相比等你将样机制作完成之后再进行返工,可要轻松许多了。
当你读完了这篇文章之后,你对于舵机究竟怎样去改变方向是不是心里已经大概或者可以说有了一定的数了?在你以往所做过的那些项目当中,你曾经碰到过最为奇葩与众不同的舵机转向方面的问题到底是什么?快来至评论区去分享一下,倘若你觉得它是有用处效果的情况之下,那么一定不要忘记给相关内容点赞并且转发给身边也在玩舵机的朋友!























