



























TECHNICAL SUPPORT

发布时间: 2026-04-01
这儿给您呈现的,是关于32路舵机控制板的完整使用指南,它包含了从硬件接线开始,到软件配置,再到编程控制的所有操作步骤,能助力您迅速上手,进而应用到机器人、机械臂等项目当中。
在开始操作前,请确保您已备齐以下物品:
1. 一块32路舵机控制板,一般是基于芯片,或者是同类PWM驱动方案的。
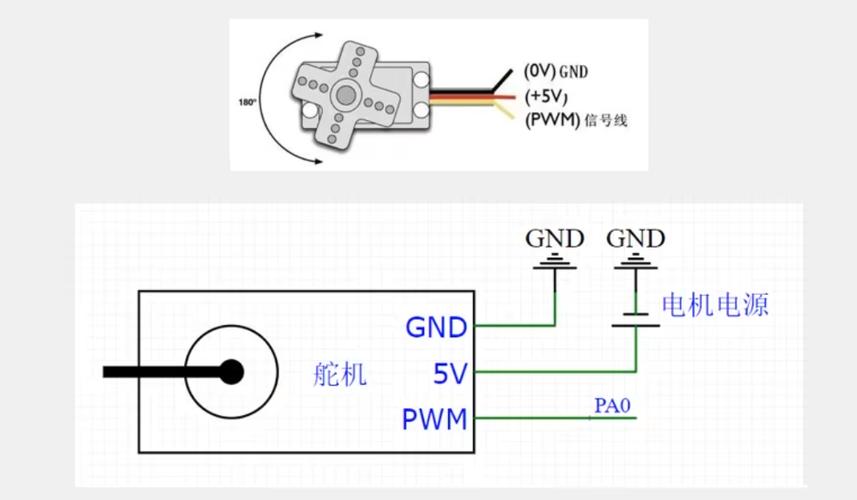
2. 舵机:若干,标准3线舵机(棕/红/橙或黑/红/白)。
3. 用于外部的电源:从您所运用的舵机数量以及型号出发,挑选电压符合要求得以适配的电源。关键的提示要点在于:大多数的32路舵机控制板自身不能够供给大电流,一定要为舵机配备单独的外部电源。举例说明,要是同时驱动超过10个的舵机,建议采用6V/10A以上的开关电源。
4. 就像是 Uno 跟 ESP32 这样的微控制器,或者是借助 USB 转串口模块并通过电脑软件来进行控制。
5. 连接所用到的线材有,杜邦线,其为公对母以及母对母的类型,还有电源接线端子,或者是DC插头。
6. 若使用,软件环境为 IDE,若使用树莓派或电脑,软件环境是环境,或者是控制板厂商所提供的调试软件。
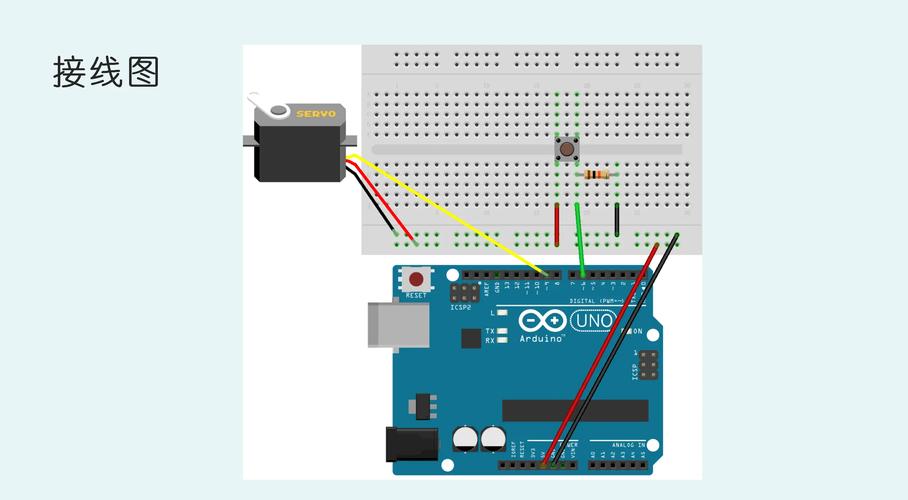
控制失败或者设备损坏,其最常见原因是接线错误。请按照以下顺序严格进行操作:
控制板逻辑电源,采用Micro USB线伟创动力舵机,或者借助VCC引脚,来提供5V直流电,以此给控制板自身芯片供电。
舵机电源(关键):
寻得在控制板之上,标有V +(或者VCC)以及GND的,具备大电流的接线端子,又或是排针。
将外部电源的正极连接到 V+,负极连接到 GND。
重要:此电源专门为舵机提供动力。确保外部电源的电压与舵机额定电压一致(如标准舵机为4.8V6V),且电流足以驱动所有舵机同时工作。若电源电流不足,会导致舵机抖动、无力,甚至烧毁控制板上的稳压芯片。
把舵机的三线接口,插入控制板的PWM输出通道,该通道通常标有SIG、V+、GND,或者标有S、+、。
信号线(SIG):连接控制板的PWM信号引脚。
连接控制板的舵机电源正极排针的电源线(V+),此排针已与外部电源V+连通。
地线(GND):连接控制板的舵机电源地线排针。
借助使用I2C总线,也就是通常所说的SCL、SDA引脚,去把微控制器,像这样,与控制板进行连接。要是控制板被设计成USB直接控制的形式,那么就不需要进行这一步骤。
通常情况下,控制板是借助I2C协议来跟主控开展通信的。最常被运用的在此作为例子阐述。驱动板同样在此作为例子进行说明。
1. 安装驱动库,于 IDE里,将“库管理器”打开,搜寻并且安装“ PWM Servo ”,此乃最为通用且稳定的驱动库。
2. 搞清楚 I2C 地址:32 路舵机控制板一般存在一个能够选择的 I2C 地址,它默认设定为 0x40。要是您动用了地址跳线,那就得记下来更改之后的地址。
3. 编写初始化代码:
#
#
// 创建对象,地址默认0x40
ver pwm = ver(0x40);
void setup() {
.begin();
pwm.begin();
pwm.cy(); // 设置晶振频率,通常为27MHz
pwm.(50); // 设置PWM频率为50Hz,对应标准舵机
delay(10);
}
舵机那角度的呈现,是借助对PWM脉冲宽度(一般是从1ms至2ms)加以控制达成的。于驱动库里面,我们运用的是(, on, off)这个函数。
对于50Hz信号,此信号周期为20ms ,在这种情况下,0度所对应的脉冲宽度是1ms ,其中0.5ms属于极端值,而该极端值是视舵机而定的 ,另外,180度所对应的脉冲宽度为2ms。
角度转换公式:将角度转换为“off”计数值。
脉搏宽度等于将角度映射在,从0到180的范围,依据最小脉冲幅度,到最大脉冲幅度的区间内,所得到的值。
等于,除以20000再乘以4096,因为控制板PWM分辨率为12位,也就是0到4095。
示例代码:控制1号舵机转至90度
void ( , int angle) {
// 假设最小脉冲500us,最大脉冲(根据舵机实际调整)
int = 500;
int = 2500;
int pulse = map(angle, 0, 180, , );
int = pulse 4096 / 20000;
pwm.(, 0, );
}
void loop() {
(0, 90); // 将通道0的舵机转到90度
delay(1000);
}
于视频教程里,您能够依照以下这一逻辑去开展演示,从而使得观众可以直接以直观的方式去理解。
1. 演示案例一:单舵机基础控制
场景:一个简单的机械爪开合。
连接一个舵机,发送0度指令,观察舵机臂因之精确移动,验证通信正常,再发送90度指令,观察舵机臂因之精确移动,验证接线正常,发送180度指令,观察舵机臂因之精确移动,验证通信正常。
2. 演示案例二:多舵机联动控制
场景:模拟六足机器人的单腿运动或机械臂的复合动作。
开展这样一项操作,内容是:连接6个至8个舵机,还要编写一个简单的循环程序,使得舵机依照顺序从0度开始移动直至180度。着重进行展示的是:哪怕有多个舵机同时开展动作 ,电源供应依旧保持稳定状态,舵机也不会出现抖动情况,通过这种方式来验证外部电源的功率是不是充足。
3. 演示案例三:常见问题排查
场景:模拟用户常见错误。
操作:
故意先不接外部电源,展示舵机不工作或乱抖。
演示接反信号线导致的异常。
将如何在代码里伟创动力,对脉冲宽度范围,也就是和进行调整的方法进行展示,以此来适应不同品牌舵机,所存在的行程差异。
问题现象 可能原因 |
: : : |
舵机无反应 1. 外部电源未接或电压过低
2. 控制板与主控通信失败
3. 舵机的信号线,出现了接触不良的状况,对于此情况,要进行如下操作:,测量外部电源的输出情况,以此来确保电压以及电流能够达到标准要求。
2. 检查I2C地址是否正确,使用I2C扫描程序确认设备在线
3. 重新插拔舵机线 |
舵机抖动/震动 1. 电源功率不足
2. PWM频率或脉冲宽度不稳定
3. 有多个舵机共同分享的电源线,其长度过长, 在控制板电源输入端,并联大电容(比如),来更换更大电流的电源。
2. 查看代码里头,是不是50Hz,并且去确认cy跟实际的晶振相匹配。
3. 缩短电源线,或采用星型供电 |
舵机没办法转到指定的角度,其一,脉冲宽度的范围,也就是 以及 ,和舵机不相匹配。
2. 舵机机械限位,通过串口输出当下计算得出的脉冲值,逐步对代码里的最小以及最大脉冲参数进行微调,从而找到舵机实际的行程范围。
2. 检查舵机臂是否被机械结构阻挡 |
1. 按照单舵机测试起始的流程来:不要在初始阶段就一次性连接32个舵机。呢,仅仅连接1个舵机,再运用示例代码或者调试软件去做验证,确保接线以及通信完全无误。
2. 确定电源选型乃是达成成功的关键所在,依据您所规划驱动的舵机数量以及最大堵转电流之情况,挑选出至少预留百分之三十余量的电源。针对该项目而言,建议优先选用开关电源而非电池包,以此来确保电压处于稳定状态。
3. 好好利用官方所给出的示例,在安装驱动库之后,一定要去运行它自身所携带的示例代码,就像servo示例那样,这可是能够最为快速地验证硬件完好无损的办法呀。
对于32路舵机控制板的精准把握,关键之处在于明晰其PWM驱动的原理,以及独立供电的机制。按照本文所给出的步骤去操作,您就能够以高效且稳定的状态,达成对多达32个舵机的精准控制,进而为您的机器人、机械臂或者自动化项目筑牢坚实的奠基作用。























