



























TECHNICAL SUPPORT

发布时间: 2026-04-21
舵机一旦启动便出现卡顿现象伟创动力舵机,主控板会忽然重启,多个舵机一同动作之际会抖动且无力,这些存在问题的根源常常是电源限流保护或者供电能力欠缺。简单来讲,舵机在启动以及堵转瞬间会抽取远超过正常工作电流状态下所需求的峰值电流,倘若电源无法供给这个瞬时电流,就会引发限流或者电压跌落情况,致使舵机出现异常表现,解决舵机电源限流问题的关键方法是,为舵机给予独立的、带有足够冗余量的电源通路,与此同时借助大电容来补充瞬时电流缺口以从根源上规避跟主控电路去争抢电流。
舵机内部的直流电机,在启动瞬间的时候,处于静止状态,此时电流仅仅受到线圈内阻的限制,这个被称作“堵转电流”的,通常是舵机额定工作电流的2到3倍。比如说,有一个标称工作电流为1A的标准舵机,它启动瞬间的电流,可能达到2.5A甚至于更高。当多个舵机同时启动时,峰值电流会叠加。要是电源,如USB接口、稳压模块、电池保护板,有过流保护功能,一旦电流超过阈值,就会切断输出或者拉低电压,进而造成舵机抖动、主控复位。
权威数据所依:按照行业通用规范之要求,舵机堵转电流,也就是Stall 这一参数,在产品规格书中是要明确予以标注的,此标注数值便是舵机能够承受的最大瞬时电流。于实际工程运用当中,电源的峰值输出能力最少起码是所有舵机所对应的堵转电流加起来总和的1.5倍。
对舵机电源和主控板电源,像单片机、接收机这类的电源,要做到完全分离,这可是最为可靠的解决办法。
操作步骤:
1. 给每一个舵机配置一个单独的电池,或者配备一个电源适配器,平常使用的电压,存在这样的范围,一是4.8V到7.4V,这是标准舵机所需的电压、二是8.4V到12V,这是高压舵机需要的电压。
2. 舵机电源正负极直接连接到该独立电源。
3. 关键连线,所有舵机的信号线依旧连接至主控板的PWM或者串口引脚,然而舵机的负极也就是GND,必定要跟主控板的GND共地,不然信号无法形成回路。
4. 确保独立电源的输出电流能力大于所有舵机堵转电流总和。
其所适用的场景为伟创动力,机器人,还有多轴机械臂,并包括航模等,这些项目对于舵机响应有着较高要求,而且舵机数量众多的情况。
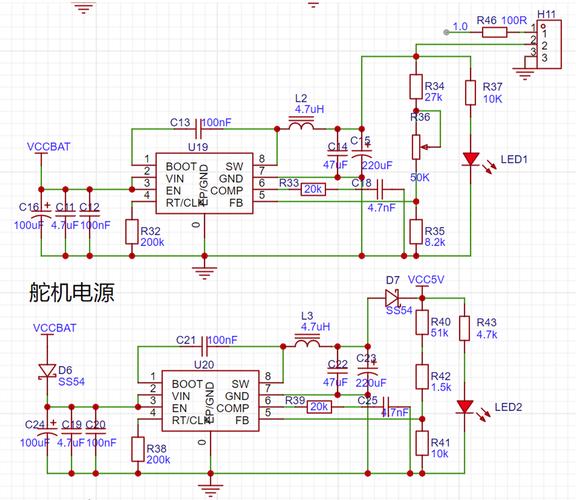
将一个大容量电解电容,并联于舵机电源的正负极之间,凭借电容具备的快速充放电特性,去补充瞬时大电流。
电容选型:
其容量所在范围是,从470μF起始一直到2200μF截止,而电压等级必要处于,比舵机工作电压高1.5倍的状况下。
可以在电源总线上将多个舵机并联一个大电容(像是1000μF至2200μF那样),也能够在每个舵机旁边各自独立并联一个470μF电容。
电容的连接方式是这样的,把电容的正极去连接舵机电源的正极,将电容的负极连接舵机电源的负极。电容的引脚要尽可能短,并且要靠近舵机电源的入口。
当舵机启动的那一瞬间,电源电压出现跌落的情况时,电容会释放出储存的电荷来进行补充,进而使电压维持所在数值在舵机正常工作阈值线谱范围以上这般样子,由此从而避免触发电源的过流保护情况或者是出现欠压复位这样严重的糟糕问题。
可用于验证的依据是,按照电容器的基本公式来看,也就是 I = C * (dV/dt) 这个式子,当电压跌落速率 dV/dt 保持相同的情况下,电容的容量 C 要是越大,那么这个电容能够提供的瞬时电流 I 就会越大。从实际测试情况来说,在出现 1A 负载的时候,如果并联 1000μF 的电容,就能够有效地吸收大约 200ms 的瞬时过流冲击。
在针对运用电池来供应电力的可移动装置而言啊,给出的建议是,使用那种额定电流足够充裕的稳压模块,或者是BEC,也就是电池消除电路,英文全称为 。
选型标准:
对于稳压模块而言,其持续输出的电流,是舵机持续工作时电流总和的1.5倍还要多,而峰值电流呢,要能够覆盖舵机堵转时电流的总和。
常见规格:5V/3A、6V/5A、7.4V/10A等模块。
航模里头常常会用外置的BEC,像3A、5A、10A这种规格的,去替换电调自身带的BEC,这是由于自带的BEC一般电流比较小,大多是1A到2A,很容易引发限流的情况。
先要明确接线的方式,电池要接入到有着大功率特点的稳压模块的输入端,稳压模块的输出端则要连接舵机电源总线,主控板在用电方面既可以共同使用这个电源,也能够独立进行供电。
问题1:已经加了电容,为什么多个舵机同时动还是会重启?
缘由是,电容容量未达充足标准,或者,电源自身的最大输出电流已然快要逼近舵机堵转电流的总和了。
解决:增大电容至2200μF以上,或改用方案一的独立电源。
问题2:如何判断是电源限流问题还是信号问题?
验证的方法是,使用万用表去测量舵机电源正负极之间的电压,当舵机处于不动作的状态时,电压呈现正常的情况,比如是5V,而当舵机启动的瞬间,电压下跌到4.5V以下甚至更低,那么这100%归因于电源供电不足而导致。要是电压是正常的,然而舵机依旧不转动,那就再去检查信号线。
问题3:使用USB接口给舵机供电,为什么经常失败?
原因在于,标准USB 2.0接口的最大输出电流,一般情况下是500mA,而USB 3.0是900mA,TypeC默认3A,不过会受到线材以及设备的限制。一个普通9g舵机的堵转电流,有可能达到1A以上,此时USB接口的过流保护就会马上触发。
完全严禁,千万不要把若干个舵机直接连接到电脑的USB接口之处,或者连接到开发板的5V引脚,以此来获取电力供应。一定要采用外部独立的电源去供电。
1. 马上对现有的电源开展检查:去确认你当下用以舵机的那个电源,也就是(涉及到电池、适配器、USB这些类型的)电源的标称输出电流。要是这个电流的值小于舵机堵转电流加起来的总和,那就得马上替换成输出电流更大一些的电源。
2. 极其简易的、成本低廉的改进方式为:于舵机电源的正极和负极之间,焊接一个容量处于470μF至1000μF范围的电解电容。成本是低于1元的,它能够解决大部分因瞬时电流冲击所引发的限流问题。
3. 对舵机而言,采取最为可靠的方案是,为其配备独立电池或者高功率稳压模块,并且要把舵机的GND与主控的GND通过单点共地,这可是专业机器人以及比赛级设备的标准做法呀。
4. 进行测试验证,在修改之后,要使得所有的舵机去开展做同步的、满行程的、且是高频率的动作测试,与此同时,还要运用万用表来监测电源电压是不是稳定处于舵机工作电压范围之内。
关于舵机电源限流,其本质在于,瞬时峰值电流会超出电源供给能力。针对此,需依循着,“增大电源瞬时供给能力”或者“增加缓冲储能元件”来展开。其中,独立供电、并联大电容、换用大功率稳压模块,是三种经过验证的有效路径。而后,要依照你的项目成本、空间以及可靠性要求,去选择其中一种或者组合运用,这样便能彻底解决舵机供电问题。























