



























TECHNICAL SUPPORT

发布时间: 2026-04-21
在机器人开展调试工作或者进行航模的制作期间,对于控制舵机的转速而言,这属于高频出现的需求。比如说,你着手制作一个机械臂,目的是使得夹爪能够缓慢地进行闭合操作,从而精准地抓取那些易碎的物品;又或者搭建一个监控云台,此时需要摄像头能够以匀速的状态进行旋转扫描。然而在直接给舵机供应电力之后,它要么处于不转动的情形,要么会以固定的速度猛地快速转动,根本没有办法进行调节。这是由于不同类型的舵机所对应的调速方法是完全存在差异的,要是使用错误的方法,不但不会产生相应的效果,还极有可能对舵机造成损坏。下面直接将核心的呈现出来。
舵机调速的关键第一步,不是调信号,而是看舵机能否连续旋转。
常用于普通位置的舵机,其转动范围一般是零点至一百八十度或者零点至二百七十度,仅仅能够停留在指定的角度位置,不可以进行连续转动。它所谓提及的“转速”,实际上指的是从当前所处角度转变到目标角度这一过程当中的速度快慢状态。
可进行连续旋转的舵机,具备能够 360°无限制旋转的特性,不存在角度方面的限制条件,其转动状态如同直流电机那样可以持续不断地转动,它所提及的“转速”这一概念,所指代的是旋转时的快慢程度以及转动的方向。
怎样去进行判断,那就是查看舵机说明书里的“角度范围”参数,要是标有“0~180°”或者“0~270°”的就是普通舵机,要是标有“直流360°”、“可控速连续360°”或者“连续旋转”的就是连续舵机。还能够手动试试看,给舵机一个1.5ms脉宽信号也就是中立点,普通舵机会停在中间位置而且阻力非常大,连续舵机则停止转会动但是阻力小。
一般的舵机自身是没有调速功能的,它的转运速度是由内部的电机以及齿轮箱所固定的。不过你能够借助控制指令发出的频率达成“慢速效果”。
操作步骤:
1. 把目标角度进行分解,使其成为多个小步长角度。举例来说,要是需从0°转向180°的情况下,并非直接发送180°那样的指令而去,而是将其划分成18步,每一步的角度是10°。
2. 每当进行一步发送操作时,便加入固定时长的延时。延时的时长越长,整个的转动就会表现得越来越慢。延时50毫秒的情况相较于延时10毫秒的情况,其转动速度慢了5倍。
3. 延迟终止过后再去发送接下来一步,保证舵机达成当前位置挪动之后再去接收全新指令。
常见的案例呈现为,运用去控制机械臂进行鸡蛋抓取的操作。先是直接发送90°的指令,致使舵机在0.2秒的时间内迅猛转动直至到位,进而出现鸡蛋被弹飞的情况。随后改用步进延时的方法,即每一步为5°,并且延时30ms,最终总共耗时1.08秒达成慢速抓取的动作,且成功实现鸡蛋无损。
需留意,这种方法没办法改变舵机自身的最高转速,仅仅能够使整体动作变得迟缓。要是步长太大或者延时过短,舵机就会出现抖动或过冲的情况。建议步长不超过5°,延时不低于20ms。

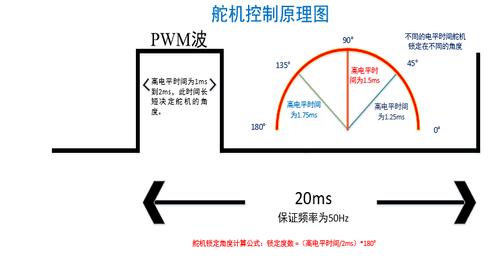
连续旋转舵机的转速与PWM信号高电平脉宽呈线性关系。
标准信号的参数是,周期为20ms也就是50Hz,脉宽的范围是0.5ms至2.5ms。
中立点(停止):脉宽1.5ms,转速为0。
正向全速:脉宽2.5ms(或2.4ms),转速最大。
反向全速:脉宽0.5ms(或0.6ms),转速最大反向。
处于中间状态的脉宽,是指在1.5ms之外的脉宽数值,脉宽偏离的幅度越大,那么转速也就越快。比如说,当脉宽为1.7ms的时候,所对应的是大约30%的正向转速,而当脉宽是1.3ms的时候,对应的则是30%的反向转速。
操作步骤:
1. 输出周期20ms的PWM信号。
2. 去设定目标脉宽的值:要是需要百分之五十朝着正方向的转速,脉宽等于一点五加括号二点五减一点五括号乘以零点五等于二点零毫秒。
3. 将脉宽信号持续输出,舵机即保持该转速连续旋转。
常见的情况示例:去制作出一个用于监控的云台,对此有着要求是两秒钟转动一圈。还有某个连续的舵机,当脉宽处于2.0ms的时候,其转速是每分钟六十转,也就是一秒钟转一圈,那么就需要把脉宽降低到1.7ms的时候,大概是每分钟三十转,这就是两秒钟转一圈的情况。通过经过多次实际测量出来的脉宽和转速的对应表格,就能够做到精确的调校。
需留意,各不相同的连续舵机,其脉宽与转速之间的线性度,有可能存在差异,在此建议,运用示波器或者逻辑分析仪来进行校准。供电电压倘若发生变化,同样会对转速产生影响,所以要保持电压处于稳定状态(比如5V或者7.4V)。
供电的电压情况是,电压要是越高的话,那么舵机内部的电机转速就会越快。对于普通舵机而言,在处于4.8V以及7.4V的情况下,针对同一指令的那种转动速度能够相差30%以上!要是需要稳定转速的话,那就得使用稳压电源。
负载所呈现的扭矩情况是,在负载越大的状况下,实际转速就会越发缓慢。一旦负载超出了舵机额定扭矩,那么舵机就会出现堵转现象,甚至可能会被烧毁。在进行调速操作的时候,要保证负载不会超过舵机最大扭矩(其单位为kg·cm)。
控制信号的频率,少数舵机能够支持更高的频率,像是333Hz这样的频率。提高频率可以让响应变得更加平滑伟创动力舵机,然而却不会改变最高的转速。请严格按照舵机说明书来设定频率,频率过高的话会导致失控。
重复核心观点:
在对舵机转速做控制之前,要将普通位置舵机与连续旋转舵机区分开来,因为这二者的速率调整方式是全然不一样的。
普通的舵机,借助“步进延时法”达成慢速定位,连续的舵机依靠“PWM脉宽偏离中立点”进行线性控制转速。
供电电压会影响实际转速,负载大小会影响实际转速,信号频率会影响实际转速,需要保持参数一致。
立即行动建议:
1. 查看你的舵机说明书,确认类型和允许的脉宽范围。
2. 要是属于普通舵机,在编写控制程序之际,运用步长小于或等于5°、延时大于或等于20ms的循环指令。
3. 要是属于连续舵机,借助示波器实际测量脉宽跟转速的对应关系(处于空载状况下),记录五个点(停止状态、百分之二十五转速、百分之五十转速、百分之七十五转速、百分之一百转速)的脉宽数值,之后运用到你的项目里。
4. 倘若舵机转速依旧处于不稳定的状态,那么要去查看供电电源伟创动力,瞧一瞧其是否纹波过大,或者是否存在电压跌落的情况。
依照上述方式去进行操作,你能够精确把控任意一个舵机的转动速度,从而符合从精细定位直至匀速转动的所有场景的需求。























