



























TECHNICAL SUPPORT

发布时间: 2026-04-27
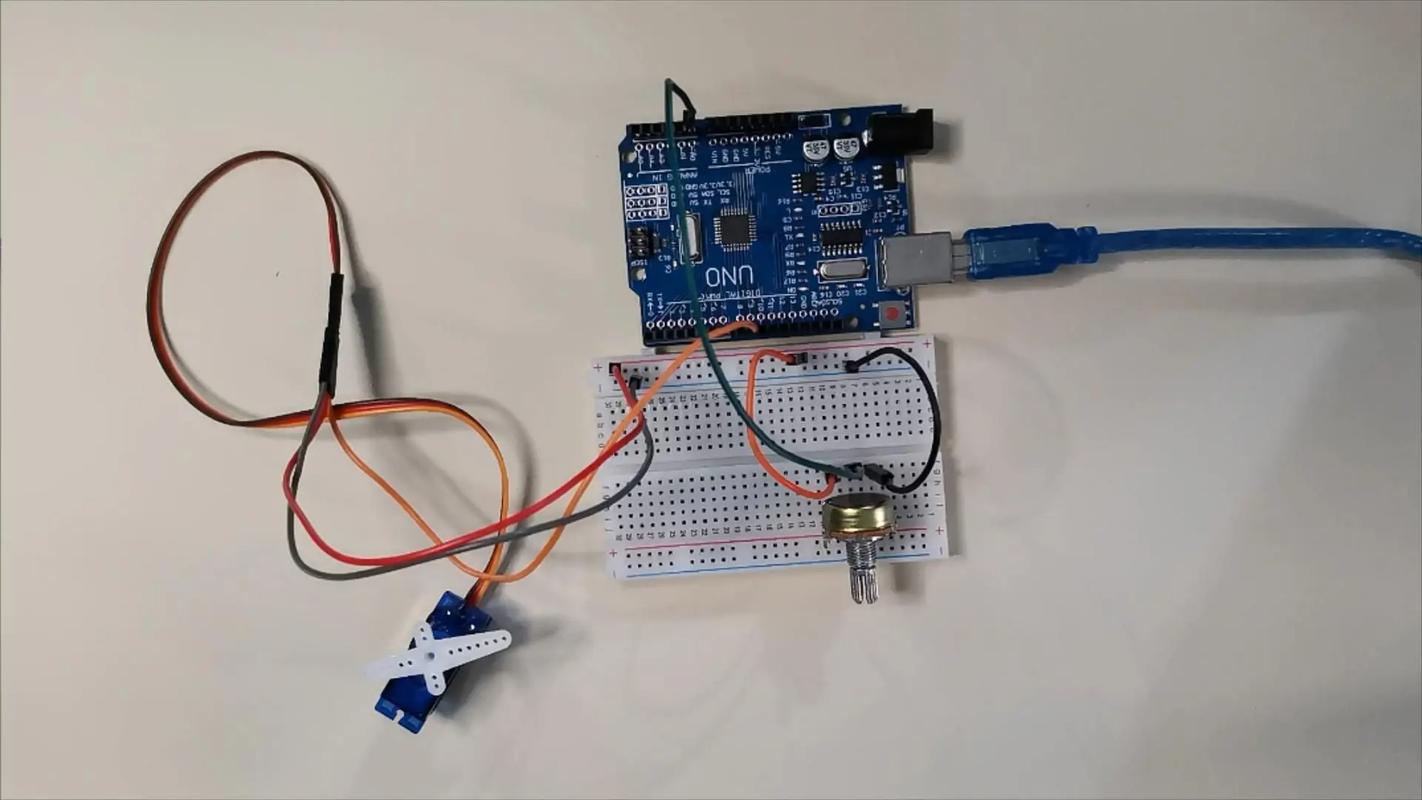
你有没有碰到过这般状况:转动电位器时,舵机丝毫不动?还是一转动就剧烈地抖动不停?亦或是转动的角度与舵机转动的角度不相匹配?本文会借助一个极为常见的实例——运用开发板以及旋转角度为300°的电位器,去控制180°的标准舵机,一步一步地教你达成调试。
主要结论是,电位器对舵机旋转起到控制作用,其本质在于把电位器的模拟电压值,也就是处于0到5V范围的那个值,映射成为舵机PWM信号的高电平时间,这一高电平时间通常是在0.5ms至2.5ms区间内。只要切实做好硬件连接、精心编写映射代码伟创动力,并且依据实际情形校准零点,便能够达成通过旋钮对舵机角度进行平滑控制。
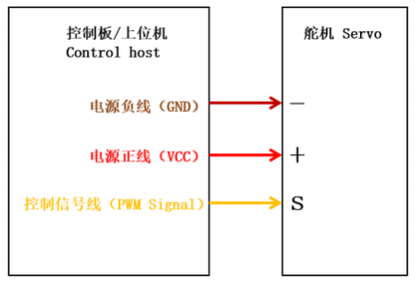
这儿是标准舵机,也就是那种3线制的,跟电位器,就是3引脚的,它们的标准连接方式,要严格依照此表来进行接线。
常见错误检查:
每一个GND都得连接到一块儿,其中包括开发板的GND,还有舵机的GND,以及外接电源的GND。
那个电位器中间的引脚,一定要连接至模拟输入引脚,也就是A0到A5这些,绝对不可以是数字引脚,是有明确规定的,其中不能有任何差错。
连接舵机信号线时,要连接到,能够支持PWM的数字引脚,在 Uno上,这些引脚分别是3、5、6、9、10、11。
下面这些代码能够直接去进行复制然后加以使用,其已经在 IDE 1.8.19这个版本之中测试通过了标点符号。
#
// 定义引脚
const int = A0; // 电位器接A0
const int = 9; // 舵机信号线接9号引脚
// 创建舵机对象
Servo ;
// 变量声明
int = 0; // 存储电位器原始读数(01023)
int angle = 0; // 存储计算后的舵机角度(0180)
void setup() {
.(); // 将舵机连接到指定引脚
.begin(9600); // 初始化串口监视器,便于调试
}
void loop() {
// 步骤1:读取电位器当前值
= (); // 返回值范围:0 1023
// 步骤2:将电位器值映射为舵机角度
// map(原始值, 原始最小值, 原始最大值, 目标最小值, 目标最大值)
angle = map(, 0, 1023, 0, 180);
// 步骤3:控制舵机旋转到指定角度
.write(angle);
// 可选:输出到串口监视器,用于校准
.print(": ");
.print();
.print(" > Angle: ");
.(angle);
delay(15); // 小延时,让舵机有足够时间响应(减少抖动)
}
原因排查顺序(按可能性从高到低):
1. 舵机电源不足时采用万用表去测量其电压,标准样式类型的舵机所需的电压范围是4.8V到6.0V,要是电压低于4.5V就不能够启动了。
实现解决办法:运用4节AA电池,以达成共6V的供电效果从而实现为舵机单独供电,或者采用专用稳压模块来为舵机单独供电。
2. 信号线出现连接错误的情况,要去确认,舵机信号线处于代码里所指定的PWM引脚上,在这个例子当中此引脚为9号。
3. 代码没能成功上传上去,去查看板上面TX/RX灯是不是在闪烁,再者查看串口监视器有没有输出。
原因: 电位器读数不稳定或映射后的角度值跳变。
解决方法:
增添代码里的延时,把delay(15)给 成 delay(20)。
添加滤波(推荐使用移动平均):
// 替换原有的读取方式
int () {
int sum = 0;
for(int i = 0; i < 5; i++) {
sum += ();
delay(2);
}
sum / 5;
}
// 在loop()中调用: = ();
原因: 电位器的实际旋转角度与代码中映射范围不一致。
解决方法(校准方法):
1. 将的串口监视器开启(即通过工具板块里的串口监视器选项,其波特率设定为9600)。
2. 把电位器朝着逆时针的方向,转动直至到达最底部,记下所显示的数值,比如说:18!
3. 把电位器朝着顺时针方向转动直至完全转到尽头,记下所显示的数字(好比:1005)。
4. 修改代码中的映射语句:
// 将默认的(0, 1023)替换为实际测量的最小值、最大值
angle = map(, 18, 1005, 0, 180);
// 添加范围限制伟创动力舵机,防止超出0180
angle = (angle, 0, 180);
解决方法(两种任选其一):
方法一(交换映射顺序):
angle = map(, 0, 1023, 180, 0); // 交换最小值和最大值
方式二(借助物理手段对电线予以交换),将电位器左边以及右边的接线进行交换操作(也就是把5V与GND相互换位)。
每一种不同的舵机,针对PWM信号所提出的要求全然不一样,要依据你所拥有的舵机的具体类型,去确切地认定相关参数:
如果舵机行为异常(如转不到最大角度):
使用示波器或逻辑分析仪测量9号引脚输出的PWM高电平时间
改变Servo.h库的脉冲范畴(借由.(, , )):
// 例如:设置脉冲范围为600μs2400μs
.(, 600, 2400);
// 在angle计算后添加判断
int = 0;
if (abs(angle ) > 2) { // 只有角度变化超过2°才更新
.write(angle);
= angle;
}
// 使用库,将读取和输出放在中断服务函数中
#
void setup() {
.(20000); // 20ms周期
.();
}
void () {
// 在此函数中执行电位器读取和舵机控制
}
Servo , ;
.(9);
.(10);
// 读取两个电位器(接A0和A1)
int = map((A0), 0, 1023, 0, 180);
int = map((A1), 0, 1023, 0, 180);
.write();
.write();
关键要点再度着重指出:电位器跟舵机的协同,重点之处在于“映射”,也就是要把电位器的电压范畴即括0至1023这个区间,借助数学转换去对应到舵机的角度范围即涵盖0至180这个度数。一旦把握了这个原理,不管是更换任何种类的电位器比如300°、360°这种,或是舵机比如270°、连续旋转这种类型,均能够经由修改代码里的映射参数达成控制。
现在请立即行动:
1. 第一步:按照本文的接线表连接电路,特别注意共地和独立供电
2. 步入第二步,将核心代码复制至 IDE,进行上传操作,而后打开串口监视器。
3. 第三步:旋转电位器,观察舵机是否跟随转动
4. 第四步:如果出现异常,逐一对照“常见问题”部分进行排查
5. 第五步,成功实施控制之后,试着去更改map()函数当中的参数,留意舵机行为所能展示出的变化,进而深化理解。
牢记最为关键之一点,使用万用表对电压予以测量,借由串口监视器来读取数值,始终是调试硬件问题最为有效的办法。要是舵机依旧处于不工作状态,要去检查电源电压是不是达成标准(≥4.8V),这可是90%故障的根本缘由。























