



























TECHNICAL SUPPORT

发布时间: 2026-05-11
你有没有碰到过这样的情形:去组装一辆遥控小车,想着要让前轮自行转向,然而把舵机接上之后它却剧烈地抖动,或者压根就不动弹?再不然就是在制作机械臂的时候,期望关节能够精准地停在九十度的位置上,可舵机却总是差那么一点儿达不到?这些问题的背后,统统指向了同一个关键要点——对舵机的基本工作原理缺乏理解。
将毫⽆保留地详尽阐释舵机内部结构以及其⼯作⽅式的这个视频教程,你会从中掌握,舵机能够停留在特定⾓度的缘由,三根线各⾃所发挥的功⽤,PWM信号怎样去“告知”舵机转动的具体度数,并不需要任何品牌相关背景知识,仅仅讲述普遍共通的原理以及实际操作验证的⽅法。
舵机并非那种普通的直流电机,它于内部集成了电机、还有减速齿轮组、以及控制电路和角度传感器也就是电位器。其本质上是一个位置伺服机构,你给出一个目标角度,像是90° ,舵机便会借助内部的闭环控制,自动驱使电机正转或者反转,直至输出轴抵达该角度并维持不动。
工作循环:
控制器发出PWM信号,舵机内控制电路据此解算出目标角度,将该目标角度与来自电位器的当前实际角度作比较,之后驱动电机转动,电机转动带动减速齿轮,减速齿轮进而带动输出轴,待到达目标角度后停止并锁住。
面向市场销售的标准舵机,涵盖9g、20kg、35kg等常见的尺寸规格,全都采用三线接口,其颜色标准是这样的:
有这样一个异常的案例存在着,有一位对相关事物有着喜爱之情的人,把红色的线连接到了5V的手机充电器之上,结果呢伟创动力,舵机在过了几分钟之后发烫起来,并且不再转动了。其原因在于,充电器所产生的纹波是比较大的,而且电流也是不足够的,要知道,标准的舵机是需要稳定在5V/1A以上的电源的哎。由此给出的建议是,使用能够起到稳压作用的模块,或者是专用的舵机电源板。
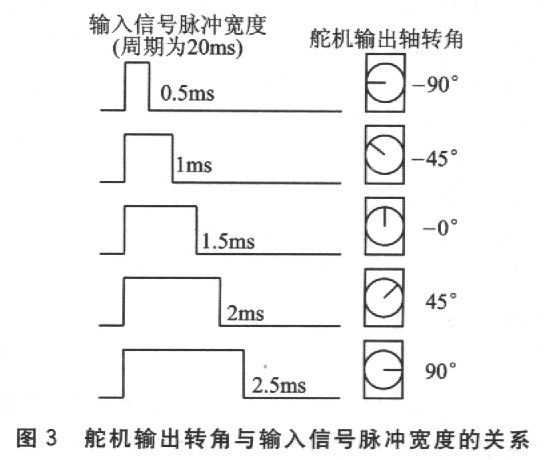
舵机在不通电的状况下不存在任何位置保持力,当它处于通电状态后,信号线需要持续不断地输入周期为20ms也就是50Hz的PWM脉冲,而脉宽也就是高电平时间决定着目标角度。
标准映射关系(绝大多数模拟舵机通用)
0.5ms脉冲 → 0度(最左极限)
1.5ms脉冲 → 90度(中位)
2.5ms脉冲 → 180度(最右极限)
留意,有部分舵机属于360°连续旋转类型(因工作方式有异,本教程未涵盖),标准航空/舵机皆为0至180°或者0至270°。
采用,或者是任何能够产生PWM的板子,着手执行以下所述的测试,如此一来便能够确认舵机是不是工作处于正常状态:
// 示例周期为20ms,改变脉宽即可改变角度
// 1.5ms高电平 → 中位;2.0ms → 约135°
倘若舵机出现响应混乱的状况,那么要去检查电源共地的情况,也即是信号线地与电源地得连通才行,要去确认PWM周期是不是为20ms,误差范围是不超过±2ms。
当你给舵机一个1.5ms的PWM信号时,内部发生了什么?
1. 信号解析:控制电路内的单稳态触发器将脉宽转换成电压信号。
2. 存在角度比较,在输出轴之上连接的可变电位器,其会与输出轴同步进行旋转,进而把实际角度转换成为电压。
3. 目标电压被送入比较器,反馈电压也被送入比较器,进而产生误差电压,此误差电压存在正、负、零三种情况,这便是误差放大。
4. 电机驱动的情形是,当误差是正时,会驱动电机朝着正转的方向运行,当误差是负之时,电机便实行反转,而当误差为零也就是到达角度之际,电机会实施制动。
5. 减弱速度增大扭矩,电机转速一般处于以上,经过多级金属或者塑料齿轮组降低速度,最终输出的转速大概是60rpm,扭矩得到大幅度的提高(比如9g舵机约为1.6kg·cm)。
解释常见现象:要是手动去掰舵机臂,就会感觉到有阻力,并且能听到“嗡嗡”声,这是电机在尽力往回返回到原来指令的角度。要是长时间施加外部的力量,内部的驱动芯片会因为电流过大而被烧毁。不要对舵机转动进行阻拦。
仿人机器人等存在需频繁进行响应的场景之时,选用数字舵机;而简单的转向、抬臂等情况,运用模拟舵机便可以了。
你并非需要价格高昂的示波器,也不是非要专用驱动板。仅仅是借助以下这些设备,按照以下这些步骤,便能够达成完整的舵机工作原理验证:
准备物料:
适配任意品牌的标准舵机,像SG90、MG995、这类,不过所施加电压不得超越6V。
具备 UNO元件构成的,结合ESP32相关特性的,含有STM32最小板部分特征的单片机开发板。
独立5V/2A电源(或降压模块+电池)
公头杜邦线若干
操作步骤:
1. 红色连接稳压电源5V,棕色连接至GND,橙色往控制板GPIO(像D9)连接。
2. 执行烧录,针对简单程序,呈现如下操作:按顺序输出脉宽为0.5毫秒、1.5毫秒、2.5毫秒的情况,并且,每一个脉宽的状态持续时长为2秒。
3. 监测舵机臂是不是逐个转向0°,再有就是转向90°,然后转向180°。要是达不到0°,亦即达不到180° ,那就去增加,或者减少脉宽,此脉宽限定在0.5~2.5ms这个范围里进行调节。
4. 把手指轻轻触碰舵机臂,去感受一下保持力矩,随后断掉电源,力矩马上就消失了,这就证实了舵机是一定要持续供电才能够定位的。
5. 采用逻辑分析仪,去抓取PWM波形,以此来验证20ms的周期,以及脉宽的变化情况。
Q1:舵机上电后左右快速抖动,不停止
原因1:电源电压不足或电流波动(常见于USB供电)。
解决:换用独立稳压电源,红线和信号线共地。
原因2:PWM信号不稳定(例如虚拟串口模拟PWM)。
进行解决,采用改换硬件PWM输出口的方式,亦或是提升刷新频率,数字舵机可调节至200Hz。
Q2:舵机只能转一个小角度,根本到不了0°或180°
前提是,输入进来的PWM脉宽范围是比0.5至2.5ms要小的,举例来说,就如同在程序当中限定为1.0至2.0ms这种情况。
应对:对程序脉宽边界予以修改,再度进行校准。部分数字舵机具备角度范围设定的支持能力,能够去查看数据手册。
Q3:舵机转动时有“咔咔”异响,手感有顿挫
原因:内部减速齿轮崩齿(常见于金属齿轮舵机在过载后)。
解决办法是,将舵机底部的四颗螺丝拆开,接着对齿轮组进行检查,然后更换损坏的齿轮或者整个舵机。要特别注意,一定不要强行加注润滑油,因为众多舵机的齿轮是采用自润滑塑料或者粉末冶金材料制成的。
当下请你牢记:舵机运行存在着底层逻辑,此逻辑涵盖了PWM脉宽映射于角度,另有内部电位器进行闭环反馈,还包括减速增矩。无论你今后使用哪类舵机,不管其品牌、尺寸、扭矩怎样,这三条规律始终不会改变。
立即行动,避免纸上谈兵:
1. 随手拿起你身旁随便一个闲置着的舵机,将其与5V电源以及单片机相连接,依照第6节所讲述的步骤完整地跑上一回。仅仅只需要10分钟,你对于PWM与角度之间关系的记忆将会远远超过单纯依靠阅读所获得的。
2. 执行调试操作之际,要是碰到抖动情形或者出现不到位状况,那么去核查电源独立共地情况,还要查看脉宽边界究竟是不是处于0.5到2.5毫秒这个范围之内,须知百分之九十的问题都是源自这两个要点之处。
3. 要是你正着手于机械臂项目,或者是智能车项目,又或者是机器人项目,那就把这份原理图(文字形式的)存到本地,每逢选型或者替换舵机之际伟创动力舵机,再度去确认供电电压以及PWM频率。
最终得出的建议是,对于任何舵机而言,在其首次进行上电这个操作的时候,要先通过手去旋转舵机的输出轴,到达机械限位之间的相关范围,以此来确认不存在任何阻碍情况。接着,要输入一个时长为1.5ms的中位信号,在完成上电这个动作之后,去观察舵机回中方面的具体情况。而这一整个步骤,能够起到预防90%意外烧毁情况发生的作用。你目前,已然掌握了关于舵机工作原理的完整知识链,这足以让你能够独立去完成舵机的选型、接线、调试以及故障排查等这一系列相关操作。























