



























TECHNICAL SUPPORT

发布时间: 2026-05-12
搭建机器人时,舵机PWM控制器是核心枢纽,它能将主控板指令精准传递给舵机。遥控搭建中,舵机PWM控制器也是核心枢纽,负责把主控板指令精准传至舵机。自动化设备搭建之际,舵机PWM控制器同样是核心枢纽,会把主控板指令准确传递给舵机。其本质作用是精确生成舵机能识别的脉宽调制信号 ,凭此去控制舵机角度或速度。本文会从控制原理开始 ,再到选型要点 ,到实际接线操作 ,给你一份可直接当作项目参考的完整指南。
操控舵机,是借助PWM信号告知其“转向何方”,这属于运用任一PWM控制器之前掌握的根基。
标准舵机控制信号遵循以下约定:
信号周期:通常为 20毫秒(频率50Hz)。
有效脉宽范围:0.5毫秒至2.5毫秒。
对应角度关系:
0.5毫秒 脉宽 → 舵机转至 0度(或最小角度)位置。
1.5毫秒 脉宽 → 舵机转至 90度(或中位)。
2.5毫秒 脉宽 → 舵机转至 180度(或最大角度)位置。
这种角度跟脉宽之间存在的严格线性关系,是所有舵机实施控制的物理基础。随便何种PWM控制器,不管它是单纯的单片机亦或是专业的舵机驱动板,其根本的任务便是稳定且毫无抖动地重现这组信号。
各个不同项目的需求两者之间差异极大,这直接就决定了需要去选择哪一类控制器,是非常关键的,要从以下四个维度来进行匹配:
在一至两个舵机的情况之下嘛,好比是简单的那种云台,能够直接去运用诸如 、STM32 这类单片机的 GPIO 引脚,借由软件定时器来产生 PWM 信号。
多个舵机,好比多自由度机器人那种,要选用专用多通道舵机驱动板。常见的是基于芯片的16路舵机驱动板,它借助I2C总线跟主控通信,只需占用极少引脚,就能独立控制住16个舵机。针对需要几十个舵机的大型项目,能够级联多个这类驱动板。
低重量量级的方案是,通过单片机予以直接驱动,它适用于那种对于实时性以及精度的要求并非十分严格的情况伟创动力,还适用于舵机数量比较少的原型验证场景。
标准的方案是,主控加上I2C或者SPI亦或是PWM扩展板。其中,主控承担着逻辑运算的职责,而扩展板专门致力于生成PWM信号。这可是最为推荐的解耦方案,它能够使得系统的运行更加稳定,并且让代码变得更加清晰。
有高精度需求,那需要专用PWM生成芯片,或者要有带硬件PWM模块的高端单片机。于机器人关节控制而言,角度分辨率的差异是极其关键重要的。普通单片机软件PWM一般角度分辨率大概在0.5度左右,然而专用控制器或者硬件PWM能轻易地达成0.1度甚至更高的控制精度,这能明显显著地提升动作平滑度。
平常所遇见的接线错误情形便是,尝试借由主控板的5V输出引脚,或者普通舵机控制板那负责逻辑供电的端口,去给多个具备大扭矩的舵机供应电力。正确的做法是:
逻辑电跟动力电相互分离,控制器自身是由主控板或者USB来进行供电的(此为逻辑电),负责着信号的生成。
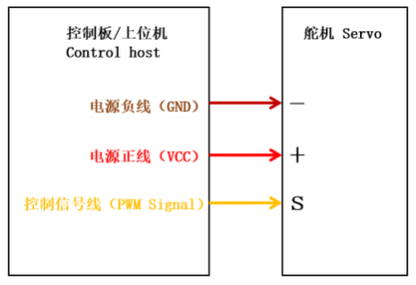
独立的动力电源,舵机的红线,得与能够供应充足电流的独立电源相连接,就举例来说,像2S锂电池(7.4V)或者高功率开关电源这样的。
非要保持共地状态:得把外部动力电源的负极,跟控制器的地线连接到一块儿,这可是使控制回路变得完整无缺、避免信号出现不稳定状况的关键所在。
典型案例:假定你正着手做一个六足机器人,它的每条腿配备3个关节,总共有着18个舵机。要是选用标称扭矩为20kg.cm级别的高压舵机,那么单个舵机堵转时的电流有可能达到2.5A。从理论上来考量,18个舵机同时进行大扭矩工作的话,或许需要高达45A的电流峰值。在开展设计之际,你要挑选至少能够供给50A的独立电源,并且要采用足够粗的导线,而绝对不是去依赖控制器板载的线性稳压器。
近距离(<1米) :I2C或SPI接口扩展板(如模块)是性价比之选。
身处远距离、工业环境或者总线式的机器人情境下,挑选具备RS 485或者CAN总线接口的舵机控制器。此具体类型的差分信号总线,在对于共模干扰的抵抗能力之上表现突出强悍有着强大的抗干扰成效,其通信能够达到的距离程度可达到数百米之长,并且它还支持在同一条总线之上挂载多个设备装置,这对于集中式或者分布式控制而言,是极为便利的一种存在情况。
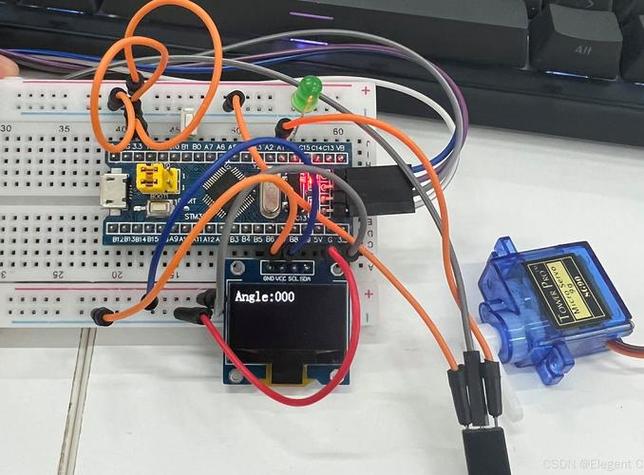
将最通用的那种,也就是“主控板 + 模块 + 标准PWM舵机”当作例子,这是能够复用到大部分项目里的核心配置。
第一步:硬件连接
1. 信号连接:
主控板 SCL → 模块 SCL 引脚
主控板 SDA → 模块 SDA 引脚
处于主控板状态下的3.3V/5V,朝着模块的VCC引脚(此为逻辑供电的那个引脚)进行连接。
主控板 GND → 模块 GND 引脚
2. 舵机连接:
将舵机信号线(通常为白/黄色)连接到模块通道(如CH0)。
3. 电源连接(关键步骤):
把独立电源的正极,连接至模块的电源输入V+这个端子。
需要关注的要点是,把独立电源的负极,同时去连接到模块的电源输入GND端子,并且还要与主控板的GND连接在一起,以此达成共地的目的。
留意,绝对不可以在已经连接了外部电源之际,把模块的V +引脚短接到主控板有着之5V引脚哟。
第二步:程序逻辑配置
在代码中,你需要完成以下三项核心设置:
1. 进行PWM频率的设置,一般情况下,是将其固定设定为50Hz,而这50Hz所对应的周期是20ms。
2. 就计算占空比而言伟创动力舵机,存在着12位分辨率显示为值0到4095,脉宽与计数值有着换算关系是这样的。
0.5ms ≈ 计数值 102
1.5ms ≈ 计数值 307
2.5ms ≈ 计数值 512
3. 编写负责写入精确角度的函数,此函数要把目标角度,像九十度那样,以线性方式映射成为计数值,也就是三百零七,随后借助I2C将其写入对应的通道。
1. 舵机抖动、无力或无法锁定位置
究其根源在于,电源供应处于不足状态。在舵机启动之际,或者是处于带载之时,电压会被拉低,进而导致控制器有复位的可能性,信号也会出现毛刺。
进行解决:查看动力电源的电压,查看其额定电流,看是否能够符合所有舵机的峰值需求。运用示波器,去观察带载的时候电源电压的跌落状况。在电源输入端并连一个大容量电解电容,像例如1000μF/16V这样的,能够很好地滤除掉瞬时大电流所造成的电压波动。
2. 舵机角度不准或行程受限
根源:PWM脉冲的最窄和最宽极限设置不当。
解决办法是,借助程序轻微调整脉宽范围,不要径直使用理论极限值0.5ms以及2.5ms。安全的做法是,先自0.8ms以及2.2ms着手进行测试,逐步朝着外部不断扩展,一直到寻找到机械死点又或者抖动点,而后朝着内部收缩5至10微秒当作软件安全限位,如此能够切实有效地保护舵机内部的齿轮以及电位器。
3. 多个舵机动作不同步
根源:在循环程序中,采用逐个写入位置指令再逐一延时的方式。
达成:运用控制器的同步去更新功能,举例来说,模块具备“自动增量写入”特性,能够把所有通道的目标位置一次性书写进寄存器内,接着再统一发送出更新指令,以此达成所有舵机的同步行动。
要使你的舵机项目稳定且可靠,需谨记这个核心法则,具备一个可进行预估的舵机控制系统,它是由单独划分出来的逻辑供电、拥有充足能量的动力电源、精确无误的信号生成以及合适恰当的机械保护共同组合构建而成的。
在下次项目中,请遵循以下行动清单:
1. 起始于计算总功率,把统计所有处于极限工况下的舵机的总电流作为步骤,再去挑选能够提供超出1.2倍余量的电源。
2. 把控制器当作信号源,要一直记着它着重处理逻辑信号,别用它的板载电路去承受动力电流,这一点需时刻谨记。
3. 采用程序来对硬件予以保护,于软件里设定角度限位,从物理层面杜绝因计算错误致使舵机损坏的可能性。
4. 对关键数据做查证:文中给出的进行控制的时序标准,是从行业里主要的舵机的普遍规范衍生而来的。针对特定的型号,一定要去查阅它的官方数据手册,以此来确定脉宽与角度对应的表格以及极限参数。
秉持前款逻辑,你便有能力构建出一套精密的、可控的、值得信赖的舵机运动系统。























