



























TECHNICAL SUPPORT

发布时间: 2026-05-14
把舵机仿真应用于51单片机,这是电子类课程设计里、DIY控制项目中高频落到实处的实训场景,它能在不做实物焊接的状况下,达成舵机角度控制逻辑的验证,极大地削减开发试错的成本。本文全部的操作都以大学生常用的课程设计典型需求作为基准,涵盖从入门到功能实现的整个流程标准步骤。
一、前期准备标准内容
比照全国高等学校电工电子实验教学示范中心所给出的入门实训规范,在开展51单片机舵机仿真之前,需要预先确认两类核心素材。
1. 核心硬件选型清单:本教程将那个在实训场景当中使用率处于最高水平的9g模拟舵机选作参考对象伟创动力舵机,它的基础标定参数是这样的:控制核心是标准51系列I/O口,工作电压处于4.8V至6V这个范围,控制协议采用经典的20ms周期PWM信号输出方式,扭矩为1.8kg·cm,转角运动范围是0°到180°,配套引脚线数是3根信号控制线。
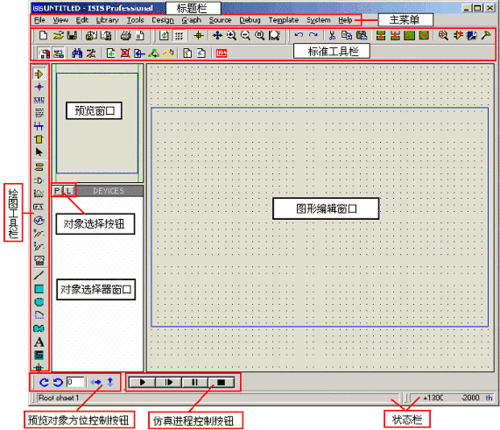
2. 关于必要的软件工具,要去挑选处于主流地位的适用于电子仿真通用用途状况下的软件,得去保证所导入的单片机构成类型的模块之精度是契合行业里通用的仿真所遵循的规矩的情形,如此才能够与后续涵盖的所有操作所提出的要求予以般配。
二、仿真电路搭建全步骤
依照电子类课程设计的常见布线逻辑,分成3个步骤达成无差错电路搭建:
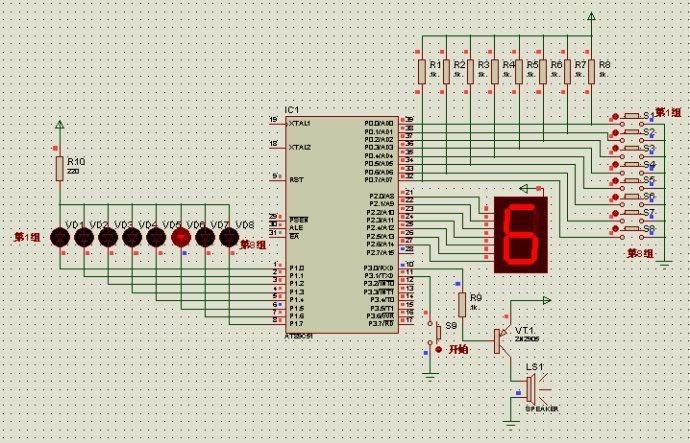
1. 布置核心仿真部件:于软件部件库内查找并增添3种器件,其一为单片机主体51子组件,其二是通用PWM控制式微型模拟9g舵机部件,其三是5V直流电源模组以及公共接地接口。
2. 连接起对应引脚:把单片机那单一的I/O自定义端口径直连至舵机输入信号控制线,将舵机正供电引出的端口接入5V直流供电接口,把舵机共用的接地引脚连接到仿真平台统一的接地端口。
3. 复位晶振配置校验,要给 51 单片机统一配置 11. 通用振荡晶振以及 30pF 谐振补偿电容,于完整复位回路里添加 10k 下拉适配电阻,再点击仿真的规则核查按钮去确认电路没有悬浮未连接引脚,不存在线路短路问题。
三、核心控制代码编写逻辑
对于大学电子实训项目里,很是普遍在使用的标准舵机。其控制底层逻辑在于,51单片机借助自定义定时资源单元精心输出,处于固定周期20毫秒范围之内的脉冲信号。并且这个脉冲信号的持续宽度是能够进行调整的,被划分成了不同意义的几种情况。其中0.5ms对应的情况是,舵机旋转锁定在0°位置;1.5ms对应的是中位90°位置;2.5ms对应的则是最大偏转角度180°位置。在此处专门针对入门级开发者给出写法特别稳定的经典控制样例,由此产生优势的代码片段:
#
sbit = P1^0; //定义舵机连接的I/O端口
int ;
void () {
TMOD = 0x01; //配置定时器0为16位计数工作模式
TH0 = 0xFE;
TL0 = 0x0C; //设定初始定时间隔50us
ET0 = 1;
EA = 1;
TR0 = 1;
}
void main() {
();
while(1) {
//按实际项目开发需求灵活设置目标控制角度
}
}
void () 1 {
TH0 = 0xFE;
TL0 = 0x0C;
++;
//累计计数判定环节调节当前信号线的电平输出状态,生成对应占空比PWM波实现角度控制
}
四、运行调试排错操作规范
将近千个,关于51单片机舵机仿真实训的项目,其常见故障点予以统计,依照优先级,给出3步快速调试逻辑:
1. 最初进行控制运行,在完成编译且没有报错从而产生标准hex烧录格式文件之后,双击51单片机组件,接着加载并写入对应的格式化hex资源,然后单次点击启动仿真按钮,要观测舵机转轴的动作响应状态。
2. 先进行快速精准校验,要是仿真场景里面舵机完全没有动作,那就先去核查3条连线的接法是不是接反接错了,之后通过修改定时计数之内对应的匹配参数,再重新确认9g舵机是不是适配当前编写的控制脉冲时序。
3. 常用功能迭代验证:所模拟实训里多次频繁覆盖的场景需求有,「按键控制舵机位置按梯度依次调节转过的角度」,「配置舵机在预定预设机位之间反复定点切换自动摆动」。每增添这类功能都分步逐步地去进行添加,每添加完成一项自定义小功能,单轮测试完成并确认能够正常运行之后,才加入下一部分增量代码功能。因为一次性整合大量代码会提升仿真问题根因定位的难度,还会延长调试的时长。
五、实操行动落地执行建议
要提醒每一位首次尝试仿真开发的学习者,要优先从小小的功能目标着手去突破,先从设定舵机仿真转动到90°中位这个极为微小的基础核心功能开始去调试并实现它,经过验证能精准且一次性成功跑通以后,在这个稳定且可用的仿真基础上逐渐增添其余所需要的扩展功能;就算后续完成了仿真准备正式去推进实物硬件焊接部分的时候,直接复用本次仿真的经过检验且可运行的完整控制代码,这样能够极大地削减整轮实际项目所有的总的落地耗时伟创动力,能够最大化前期舵机仿真过程当中所对应的实际实践价值。























