



























TECHNICAL SUPPORT

发布时间: 2026-05-16
航空公司里的伺服舵机,是用于飞机操控相关工作时候,存在控制系统里头的关键执行装置,它着重的核心本质包含的意思,是要使操作的人,也就是主要是工程师、维修相关人员、航模爱好者以及那些对此有着明确求知欲的读者,能够彻彻底底地明白,舵机怎样把微弱的电信号转化成呈90°的、能够调整的桨叶舵面转向的精准机械运动,并且达成闭环控制。在这篇文章里,会用最为直接、不存在多余内容的形式,去剖析它的工作原理,保证您仅仅是阅读这篇文章,就能够掌握从接收到输出的完整的全部工作闭环。
简要来讲,航空伺服舵机的工作原理属于一种过程,这个过程是“信号接收→位置比对→动力调整”,它是闭环负反馈的,其工作流程在本质上是对位置误差进行持续修正,目的在于确保舵面位置跟指令完全一样。
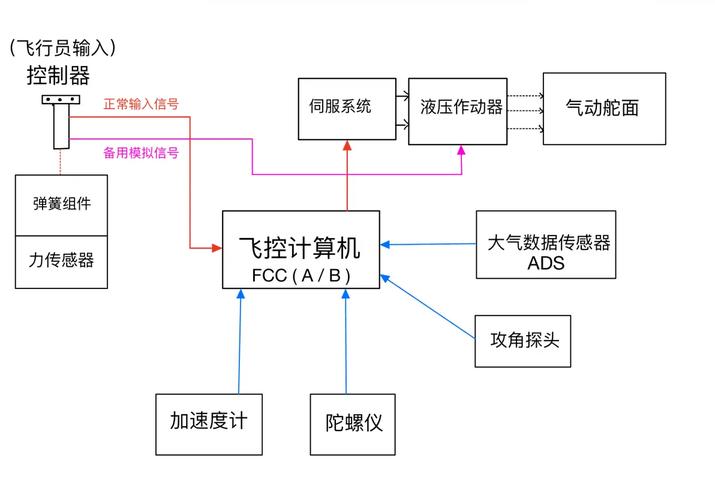
1. 信号输入方面,存在着这样的情况,即(PWM指令情形下),飞行控制计算机,或者遥控接收机,会向舵机发送脉宽调制信号。这个信号呢,是一类周期性方波脉冲,其脉冲宽度,一般处于1.0ms至2.0ms之间,它直接对应着舵机输出轴所要转动的目标角度,比如说1.5ms对应90°中间位置。
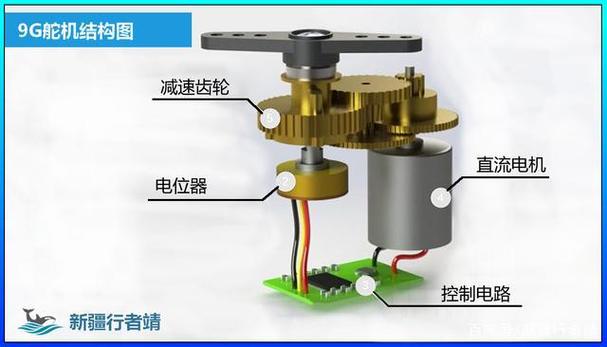
2. 身处内部的反馈以及比较(所谓误差检测):舵机内含的控制电路,其核心部分是一个位置反馈电位器(又或者是高精度编码器),它能够实时去监测输出轴所在的实际角度,并且会把这个实际角度转换成为电压信号。那边的控制电路会将目标角度信号和实际角度所反馈回来的信号进行马上比较,进而计算出位置误差值。
3. 驱动与执行(误差消除):
驱动电信号:根据误差值的正负和大小,控制电路生成驱动信号。
驱动信号,让直流电机(有刷/无刷)或者空心杯电机进行转动,转动方向分为正向以及反向,这之中,直流电机(有刷/无刷)和空心杯电机是由驱动信号来驱动的。
先有电机高速低扭矩转动,接着借助由多级精密行星齿轮或者金属齿构成的减速器,实施转换行为,最终变为低速高扭矩的输出,此即齿轮减速。
输出轴产生运动,减速器带着输出轴转动,输出轴还连着舵面和摇臂,借这转动改变舵面角度,舵面跟摇臂是与输出轴进行连接的!
闭环反馈,输出轴转动之际,位置反馈电位器的信号跟随发生变化,当反馈信号跟指令信号等同(误差为零)之时,驱动电路终止输出,电机停歇转动,舵机精准锁定于指令所要求的角度。
航空伺服舵机的关键要点在于,其核心是一个基于PWM信号的闭环负反馈位置伺服系统,该系统会持续去比较“指令位置”跟“实际位置”的误差,进而驱动电机以及齿轮组,一直到误差被消除,以此达成角度的精确且稳定的控制。
graph TD
A [输入指令]
A1[飞行计算机] PWM脉宽信号 > A2[舵机控制电路]
end
B [闭环控制核心]
A2 目标角度信号 > B1[比较器]
B2[位置反馈电位器] 实际角度信号 > B1
B1 计算位置误差 > B2
end
C [执行与驱动]
B1 驱动信号 > C1[驱动电路]
C1 电流驱动 > C2[驱动电机]
C2 高速转动 > C3[减速齿轮组]
C3 低速高扭矩 > C4[输出轴舵面]
end
C4 转动角度反馈 > B2
A > B > C
C > B
1. 接收PWM信号的核心部分,是控制电路,它通常集成了微控制器,负责进行信号比对,还要进行误差计算,并且生成驱动逻辑。
2. 驱动电机:
具备刷直流电机,其成本呈现出较低的状况,控制方面较为简单,它常常会在对于成本以及体积有着敏感度的场合中频繁出现。
性能卓越的无刷直流电机,具备效率高的特性,拥有寿命长的优势,呈现响应速度快的特征,实为当代高性能航空舵机的优先选择对象。
空心杯电机,它有着极高的响应速度,它有着极高的效率,它常见于微型舵机,微型舵机需要快速反应这个特点,它也常见于高速舵机,高速舵机同样需要快速反应这个关键特性。
3. 通过减速齿轮组,能把电机的高转速加以降低,与此同时,可以大幅提升输出扭矩。航空级舵机常常采用全金属材质的齿轮,像钢、钛合金这类,以此来保证在高负载以及恶劣环境下具备可靠性与耐久性。
4. 位置传感器:
电位器:最常见,成本低,但可能存在磨损和精度寿命问题。
在高端舵机中,磁性编码器或者光编码器充当着标志之角色,其具备无接触式检测这一特性属性,而且精度很高,并且寿命特长至极。
5. 输出轴,它要承受并传递最终扭矩,其具备高强度和耐磨性,还需配备优质轴承,以此来减少摩擦,并保证运动平顺,而轴承也有这样的作用。
搞明白原理之后,挑选或者评定舵机之际,要留意下面这些跟工作原理直接关联的关键参数:
(注:以上参数的定义,以及测量的方法,是参考自相关技术标准文件伟创动力,这些文件来自美国航天工业协会,还有国际无人机系统标准协会)*。
为确保您能正确应用此原理:
1. 用于选型的行动方面的建议是,依据飞机的型号,以及舵面的尺寸和气动载荷,从扭矩、速度、电压、尺寸这四个核心维度反过来选择舵机,一定要查阅飞机制造商或者原始设计文档给出的推荐规格。
2. 对于安装以及调试这一环节,要保证舵机安装得安稳而且牢固,连杆传动能够顺利进行,不存在卡顿以及停滞的情况。在首次进行通电之前,一定要借助飞控系统或者测试仪将舵机中立点校准,以此保证PWM信号中点跟舵机机械中点是一致的。
3. 维修跟查看:按时查看齿轮之间的间隙,输出轴的游隙以及线缆的连接情况。飞行结束之后留意舵机的温度以及有无异常响声,不正常的温度升高或者噪音常常预示着内部齿轮出现磨损或是电机出现过载。
4. 当舵机出现抖动现象,或者无法归中,又或者力量不足时,需进行故障排查,排查顺序如下:信号源是否处于稳定状态,电源电压电流是否充足,舵机机械部分是否出现卡死情况,内部电位器是否损坏。
用于的结论以及起到强化作用的核心观点:总体来看,如果简要概括的话呢,那种航空伺服舵机它成为了这样一种精密随动系统,这个系统是以PWM信号作为指令,并且是以位置闭环反馈当作核心的。而要明白它的闭环工作流,也就是“输入比较驱动反馈”这个流程,这乃是能够进行正确选型、正确安装、正确调试以及排除故障的基础所在了。不管面对怎样型号的航空伺服舵机,把握住“信号决定目标,反馈修正误差”这个核心,便能够领会其工作原理的关键所在。在开展任何跟舵机有关的操作之前,一定要保证信号与电源的准确性。























