



























TECHNICAL SUPPORT

发布时间: 2026-05-17
盼望着机器人手臂能够灵活转动,琢磨着智能小车可以准确转向,亦或是期待航模飞机能够稳定飞行吗?而这一些所需情境皆离不开对舵机的精准控制。对于身为工程师的角色个体、身为学生的身份群体以及身为电子爱好者的相关人群而言,怎样借助自身所编写的单片机程序用于精确指挥一个舵机,这属于嵌入式开发与机器人制作当中的一项具备基础性质且呈现核心特征的技能。本文的目的在于成为您针对“单片机怎样控制舵机”的具备权威性、呈现一站式特点的知识来源渠道,为您拆解从信号直至动作的完整原理状况、达成相应步骤以及关键细节情形,以此确保知识形成连贯闭环,无需再次进行搜索行为。
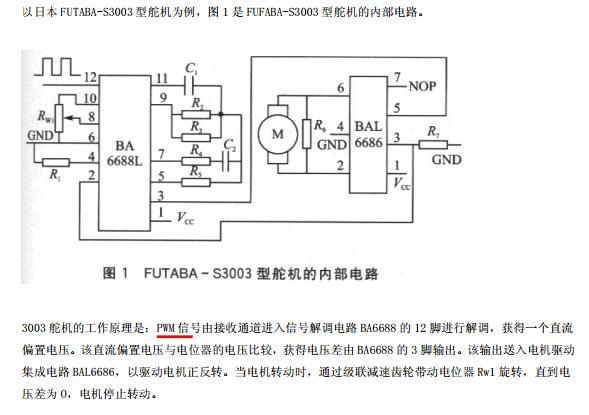
舵机是一种位置也就是角度的伺服驱动器,其核心工作原理是脉宽调制信号也就是 PWM 信号控制角度,单片机借助定时器生成特定脉宽即通常为置高电平时间的一系列方波信号,舵机内部的驱动电路依据这个脉宽来做出决策并驱动电机转动到对应的目标角度,这是一种输入宽度与输出角度的标定关系,明白了这一点,便掌握了单片机控制舵机的核心本质。
进行单片机针对舵机的控制达成,依从以下明白清晰、能够执行的步骤流程,保证您可以依照线索寻找,达成闭环运作。
第一步:硬件连接接口
绝大部分舵机具备三根线,这三根线的定义乃是业界的通行标准,连接时要严格依据这个定义来进行:
电源电线,此线即V cc且同时为红色线,它要跟5V到6V的直流稳压电源相连接,有个重要提示,绝对不能用单片机的I/O口直接向舵机供给电力,原因在于舵机启动的瞬间电流是比较大的,大到可以达到数百毫安伟创动力,这样会把单片机烧坏,一定要使用单独的电源或者开发板上的电源接口。
地线(GND/棕色或黑色线):连接至电源和单片机的公共地。
具备PWM输出功能的单片机I/O引脚,能够与信号线相连接,信号线也就是橙色或者白色线伟创动力舵机,这些引脚在中是~3、~5、~6、~9、~10、~11之类的引脚,在STM32中是定时器通道所对应的引脚呢,它们具有物理属性的存在。
第二步:理解PWM信号与角度的映射关系
舵机的角度,是由信号线输入的PWM波形里,高电平时长也就是脉冲宽度来决定的,并非在意频率。标准的映射关系是下面这样的,这属于行业通常使用的标准,依据这个能够进行编程。
脉冲宽度 0.5ms → 舵机位置 0°(最小角度)
脉冲宽度 1.5ms → 舵机位置 90°(中间位置)
脉冲宽度 2.5ms → 舵机位置 180°(最大角度)
关键参数:
周期,也就是周期频次,一般是20ms,这当中的20ms等同于50Hz。这表明舵机会在每20ms的时间跨度里面,检测一回信号线的脉冲宽度,进而驱动电机抵达相应的位置。
占空比进行计算,其计算方式为,占空比等于脉冲宽度除以周期,举例来说,当脉冲宽度为1.5ms对应0°时,相应的占空比是用1.5ms除以20ms,结果为7.5%。
第三步:单片机编程流程(以 IDE伪代码为例)
1. 开启的时候开始初始化PWM引脚,不是在其他地方,而是在编程框架的初始化函数,也就是像setup()这样的函数里面,不是做别的设置,而是要把连接舵机信号线的引脚设置成输出模式才行。
2. 想要构建PWM信号,可运用定时器,或者借助PWM库函数,比方说的(),或是更为精准的舵机库Servo.h,再对指定引脚输出拥有特定占空比的PWM波。
3. 操控角度:借由更改PWM的占空比,也就是变换脉冲宽度,进而去改变舵机角度。举例来说,调用servo.write(90)能够使舵机转动至中间位置。
为了保证您于实践里一次就达成成功,防止出现常见的陷阱,下面是一定要留意的要点:
针对于电源隔离以及滤波这方面,舵机电机于启动停止以及堵转之际,会生成电源噪声,这存在干扰单片机实现稳定工作的可能性,为此建议在舵机电源端,连接并设置一个超过100uF的电解电容来达成滤波,并且要保证电源功率充足。
多舵机操控:要是存在同时操控多个舵机的需求,那就一定要保证电源具备充足的电流输出能力(总电流等于各个舵机工作电流相加之和)。与此同时,要留意单片机PWM输出引脚的数量限制,或者思考采用等多路PWM驱动模块。
角度抖动与不归零:
抖动:通常由电源不稳定或信号干扰引起,检查电源和连接线。
有这么一种情况,不归零,这有可能是机械结构出现了卡滞的问题,又或者是舵机内部的电位器存在着偏差。而在部分舵机那里,是支持通过发送特定校准信号来进行微调操作的。
脉冲宽度存在范围,标准规定是0.5ms至2.5ms,然而众多舵机实际能够接受的范围略微宽些,像0.4ms至2.6ms这样,这能够用来达成略比180°大的转动范围,不过要留意不要超过机械极限,否则会致使齿轮损坏。
数字舵机与模拟舵机:
模拟舵机:本文所述原理主要针对模拟舵机,依赖电压比较器。
数字舵机,其舵机内部的信号处理部分属于数字电路,它响应起来更为快速,定位方面更加精准,抖动情况也更小,不过其控制原理,也就是PWM信号,是完全一样的。
当下,您能够即刻着手开展行动:挑选一款您所熟知的单片机,像是 UNO,运用标准三线连接方式,依据第二步所提及的脉宽与角度关联表,编撰一个致使舵机于0°、90°、180°之间循环摆动的程序。这本就是最直接用以验证您对于原理掌握情况的实验。在该过程当中倘若遭遇问题,能够返回“常见问题解答”部分去进行排查。
总而言之,单片机对舵机进行控制,其本质是达成一种“脉冲宽度 机械角度”的精准映射。成功的关键重点在于正确进行硬件连接(为其独立供电),准确生成PWM信号(周期为20ms,通过0.5 2.5ms脉宽来调节角度),以及预防干扰情况的发生。把这一套标准化的原理以及步骤当作您的“工程检查清单”,这样您便能稳定可靠地把各种各样的创意转化为精确精细的运动控制。























