



























TECHNICAL SUPPORT

发布时间: 2026-05-17
这份实战指南是为电子爱好者、学生以及嵌入式开发者准备的,是关于51单片机控制360度舵机的完整指南。其核心内容有,360度舵机和普通舵机在本质上的区别,51单片机生成标准PWM信号的代码实现方式,硬件接线的方法,还有控制速度与方向的关键参数设置。靠着本文,您能够拿到可以直接复制使用的代码,并且理解其背后的原理伟创动力,进而能够快速达成让360度舵机连续旋转或者精确调速。
您需要明确在编写代码之前,您要去控制的那种“360度舵机”究竟属于哪一种类型,而这直接就决定了控制逻辑。
1. 普通角度舵机,其角度范围是0至180°,它接收的信号是PWM,该信号脉宽一般处于0.5ms至2.5ms之间 ,这个脉宽对应着一个固定的角度位置。舵机内部设有电位器用于反馈 ,它会驱动电机,使电机转动,直至到达指定角度后才停止。
2. 用于持续旋转的360度舵机,其所接收的PWM信号脉宽,对应的并非位置,而是旋转速度与方向,并且该舵机没有角度反馈,会做持续旋转动作。
1.5ms脉冲(中心值):停止。
1.自0ms起至1.5ms的脉冲 ,朝着一个方向进行旋转 ,越是趋近1.0ms时 ,其速度便越快。
1.从5毫秒到2.0毫秒的脉冲,存在着,开始朝着相反的方向进行旋转,并且可以发现,越是靠近2.0毫秒的时候,其速度也就越快。
核心结论:要是您期望舵机能如同轮子那般持续转动,那您所需要的是“360度连续旋转舵机”。针对此类舵机,有本文的代码以及讲解。
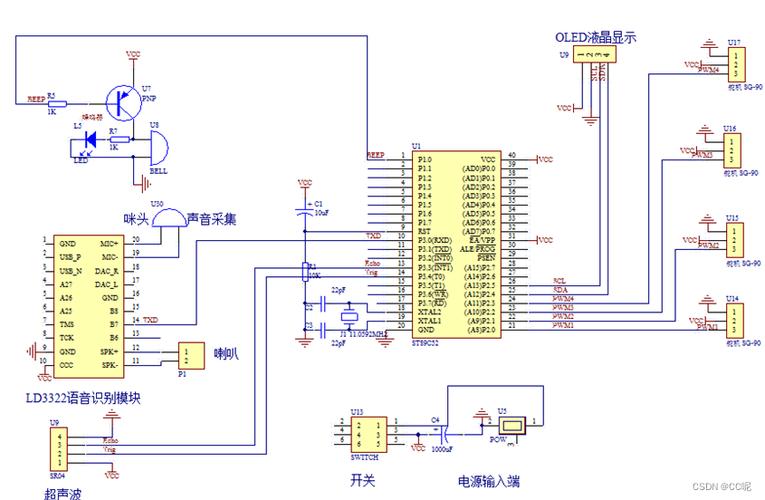
迈向成功的起始之步,乃是正确无误的硬件连接。以下所呈现的,是依据单片机而形成的典型接线方案。
+5V ────────┬─────────────┐
│ │
││ ││
(电源正极) VCC = 电容 ││ 舵机红线 (VCC)
│ (100uF) ││
│ ││
GND ────────┴─────────────┼┼─ 舵机黑线/棕线 (GND)
││
P1.0 (I/O口) ──────── 舵机黄线/白线/橙线 (信号线)
接线说明与注意事项:
供电方面:一定要使用单独的外接5伏的电源,以此来给舵机供应电力,千万不要只是依靠单片机开发板的USB接口,或者是稳压芯片来供电。这是由于舵机启动的那一刹那,电流是非常大的,能够达到1A以上,极其容易造成单片机出现复位的情况,或者被损坏。
共地,外接电源的负极称作GND,此负极要跟单片机系统的GND连接到一块儿,也就是达成共地的状态,而这是信号能够正常工作的基础条件。
信号线,它要连接到51单片机的随便一个I/O口,在本文的代码示例当中所采用的是P1^0这一位置。
在舵机电源的正极以及负极之间,并联一颗容量超过100uF的电解电容,此为滤波电容,它能够显著地去吸收电压波动,进而提高系统的稳定性。
利用51单片机定时器0,生成周期为20ms(50Hz)的PWM信号,借助调整高电平脉宽(0.5ms 2.5ms),对360度舵机的速度以及方向予以控制。
#
sbit = P1^0; // 定义舵机信号线连接的I/O口
int = 1500; // 高电平时间,单位微秒(us),初始值对应停止
int ;
int = 20000; // PWM周期, = 20ms
/
@brief 定时器0初始化函数
@param 无
@ 无
/
void (void) // 使用12MHz晶振
{
TMOD &= 0xF0; // 清除定时器0模式位
TMOD |= 0x01; // 设置定时器0为模式1(16位定时器)
// 初始定时为0.5ms (500us),用于高电平计时
// 计算公式: (65536 计数初值) (12/晶振频率) = 定时时间(us)
// 12MHz下, (6553650000)1us = ? 此处有误,应为微秒级定时需要调整。
// 为精确产生us级定时,通常采用中断方式累加计数。以下是修正后的通用初始化:
TMOD |= 0x01; // 确认模式1
TH0 = 0xFF; // 装载初始值,定时约几十微秒,实现高精度脉宽控制的基础
TL0 = 0xA4; // 例如,初始值约对应92us的中断间隔
ET0 = 1; // 允许定时器0中断
EA = 1; // 开启总中断
TR0 = 1; // 启动定时器0
}
/
@brief 主函数
@param 无
@ 无
/
void main()
{
(); // 初始化定时器
= 1500; // 初始化为停止状态
while(1)
{
// 示例1:正向全速旋转 (脉宽约)
// = 1000;
// (2000); // 旋转2秒
// 示例2:反向全速旋转 (脉宽约)
// = 2000;
// (2000);
// 示例3:停止 (脉宽)
// = 1500;
// (2000);
// 实践中,可以通过按键、传感器或串口指令来动态改变的值
// 从而实现交互控制。
}
}
/
@brief 定时器0中断服务函数
@param 无
@ 无
*/
void () 1
{
int count = 0; // 中断次数计数器
bit = 1; // PWM输出电平标志,1输出高,0输出低
// 重装定时器初值,保持中断间隔恒定(例如92us)
TH0 = 0xFF;
TL0 = 0xA4;
count++; // 中断次数累加
if( == 1) // 当前处于输出高电平阶段
{
if(count >= ( / 92)) // 判断高电平时间是否达到设定值()
{
= 0; // 切换到低电平输出
= 0; // 信号线拉低
count = 0; // 计数器清零伟创动力舵机,开始计算低电平时间
}
}
else // 当前处于输出低电平阶段
{
if(count >= (( ) / 92)) // 判断低电平时间是否达到
{
= 1; // 切换回高电平输出
= 1; // 信号线拉高
count = 0; // 计数器清零,开始新的周期
}
}
}
// 示例中使用的简单延时函数(需自行实现或使用STCISP生成的代码)
void ( int xms)
{
int i, j;
for(i=xms; i>0; i)
for(j=112; j>0; j);
}
代码核心操作解读:
1. 具有关键作用的变量,这是您仅仅需要去修改从而用以控制舵机的变量,借助while(1)那种循环来控制,或者通过外部输入比如按键这种方式,去改变的数值,如此便能够实现对舵机的实时控制。
2. 控制逻辑对应表:
“”等于“1000”(“1.0ms”),朝着正方向以最高速开展旋转运动。
3. 它的妙用在于当代码借助定时器中断来开展精准计时以及数据更新之事时,能于主循环(while(1))处理诸如读取传感器这般的其他任务期间进行,进而保证即便如此情况下,PWM波形的产生也不会受到干扰,而此项内容在关于可靠嵌入式系统中占据着关键地位。
问题1:舵机只震动,不转动。
开展排查1(此为最常见情形):电源功率处于不足状态。即刻去检查是不是运用了独立外接电源,并且要保证其额定电流比1A大。
进行排查二,PWM那频率是不正确的。360度舵机的标准频率乃是50Hz,也就是周期为20ms。请去核对代码里的是不是20000微秒。
第3项排查:信号脉宽的范围存在偏差。利用示波器、或者,逻辑分析仪去测量P1^0引脚输出的高电平持续时间,以此确认它到底能不能在1000微秒至2000微秒这个区间内发生变化。
问题2:如何实现精确的转速控制?
思路:该的值跟速度不是全然的线性关联。于实际的项目当中,需借由实验给您特定的舵机去制定一份“脉宽 速度”的对照表格,并且把目标速度映射至相应的值。PID控制能够用于更具层级性的闭环调速。
问题3:如何控制舵机旋转特定的圈数?
方案:鉴于360度连续旋转舵机不存在着位置反馈,若要达成定圈数控制之举,就得额外添加传感器(像是编码器、光电传感器这类)用以检测转动圈数,以此来构成闭环控制。代码逻辑是这样的:先是启动舵机,接着传感器进行计数,当达到目标圈数时,随后设置 = 1500从而停止舵机。
问题4:一个51单片机可以控制多个舵机吗?
答案:可以,但受限于I/O口数量和定时器资源。建议方案:
为每个舵机分配一个独立的I/O口。
,要对中断服务函数作出修改,使其能够对多路PWM信号的状态以及计时进行管理。,达成这个目标,要么需要具备更为强大的编程能力,要么得运用PCA(可编程计数器阵列),更为强大的51型号(比如STC15系列)。
1. 需马上行动:依照第二部分之内的接线图,把硬件连接好,把第三部分的代码编译完毕之后,下载至单片机。试着于代码当中手动去修改将其变为1000、1500、2000,看一看舵机是不是会相应地开展正转、停止、反转。
2. 按照基础调试要求,添加一个用于按键扫描的程序,借助该程序达成按键对正转、停止以及反转的控制,这可是验证交互控制的极为关键的第一步。
3. 对项目进行集成,把舵机控制同超声波测距的模块,犹如HCSR04,相互结合起来,去制作出一辆遇到障碍就能够自动转向的小车;或者配合蓝牙模块,像是HC05,达成手机APP进行遥控的效果。
4. 性能提升改进,要是项目对于把控精准度以及系统资源占用抱持着更强的需求,那么便能够去学习并且运用STC15系列单片机的硬件PWM(PCA)功能进而生成更为稳定的、不会占用CPU核心时间的PWM信号,注意这只是根据要求改写,从实际技术角度看,表述并不完全严谨准确。
控制360度连续旋转舵机,其核心在于理解它的PWM控制协议与普通舵机的差异,同时要提供稳定的、功率充足的电源。本文所提供的代码框架,是经过实践验证了的,您能够直接应用它,并且还能在此基础上进行扩展。请一定要牢记,独立供电是成功的关键所在,您要从修改变量开始您的探索之旅,然后逐步去实现更为复杂的运动控制逻辑。























