



























TECHNICAL SUPPORT

发布时间: 2026-05-23
想要深入透彻地搞清楚直升机舵机到底是怎样开展工作情况的么,其实啊,查看飞机舵机的机构结构示意图是最为径直有效的法子。在这篇文章当中,将会借助一张具有代表性的直升机舵机工作原理示意图纸,带领大家清晰明了地拆解弄明天它内部到底都存在些什么、各个零部件之间是怎样开展相互配合作业的,以及信号又是怎么转变为机械性动作的。不管你是刚刚涉足维修行业领域的新手、热衷于制造的爱好者,还是打算迈进无人机调试行业领域的新手,都能够凭借本文一看就能够完全明白其中的诀窍门道。
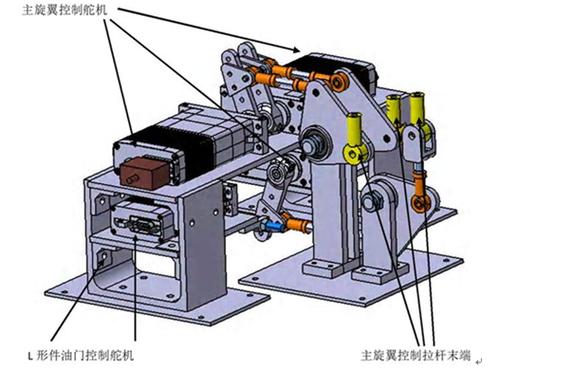
从工作原理图上看,直升机舵机通常由三大部分组成:
控制电路板,它要负责接收来自飞控发出的PWM信号,也就是脉宽调制信号,然后解析出目标角度指令来。
一般而言,电机是直流电机,它包含有刷和无刷这两种类型,其作用是提供旋转动力。
齿轮减速组,它将电机的高速旋转进行降速,同时实现增扭,进而带动输出轴转动。
处于位置方面的反馈元件,最为常见的那一种是电位器或者磁编码器,它能够在现实时间当中监测输出轴的实际角度情况,然后反馈给到控制电路这儿来。
外壳,起到保护内部机构之作用,输出摇臂呢,会把旋转运动传递给直升机舵面,像斜盘啦,还有尾桨变距机构这样的部件都涵盖在内。
有不少人于观看结构图之际会生出困惑,信号进入之后究竟是怎样转变为舵机轴的精准转动的呢?接下来依据典型闭环控制流程予以拆解。
1. 有一个由飞控发出的PWM信号被接收,该信号具特定参数,它的宽度处于1ms到2ms之间,其频率通常设定为50Hz,控制电路板上的芯片会对这个脉冲宽度进行精确测量。
2. 鉴于目标与当前进行的比对:芯片会按照特定的换算规则,把这个脉冲宽度精确地换算成目标角度。具体来讲,诸如1.5毫秒对应中立位0°,1毫秒对应90°,2毫秒对应+90°等情形。与此同时,芯片还会读取由电位器或者编码器传回的当前实际角度,借此为后续的分析以及处理提供准确的数据依据。
3. 驱动电机进行转动:假定目标角度跟当前角度并非一致,那么控制电路就会驱动电机朝着所需的方向去旋转。
4. 输出与减速:电机驱动齿轮组,历经多级减速过程,输出轴凭借更大的扭矩、更迟缓的速率进行转动,进而带动摇臂。
5. 旋转中的输出轴,哪怕转动极其微小的一点,电位器阻值就会相应地产生一点极为细微的变化,或者编码器读数也会跟着有极为轻微的一点改变。控制电路会不间断地持续进行比对,始终全神贯注高度密切地留意实际角度跟目标角度之间的差异,一直到实际角度与目标角度达成完全一模一样的状态,这时电机就会停止转动。要是在这个过程里遭受到外力干扰,系统能够快速地迅速做出反应,马上立刻重新进行调整,进而保证确保舵面位置始终稳稳地保持稳定。
在实际维修直升机舵机时,有几种问题频率很高:
舵机出现抖动现象,或者发出嗡嗡的响声,这种情况一般是因为电位器发生了磨损,又或者是齿轮间隙过大造成的。这个时候,要认真检查电位器电阻变化是不是平稳,看看它在转动的时候电阻值能不能均匀、顺滑地产生改变,有没有突变或者卡顿的情况。与此同时,还得留意齿轮有没有断齿的情形,观察齿轮的齿牙是不是完整,有没有缺失或者破损,通过这样来判断是舵机的问题的确切原因。
舵机没反应,得去测量输入电压是不是在正常状态,标准是5V或者6V,具体按型号来定,接着要查看信号线有没有断路情形,能够拆开外壳,用手转动输出轴,借此感受齿轮有无出现卡死的现象。
在使用过程中,出现响应迟钝或者动作未达到达到的标准状况,通常致使这种现象产生的因素是电压处于不足的状态或者电机的碳刷出现了磨损的情况。针对这种情况,给出的建议是更换和原来规格相同的电机或者增强供电的能力。
本质上,直升机舵机是一个有着独特运行原理的闭环位置伺服系统,它主要经由信号输入、控制电路比对、电机驱动、齿轮减速、位置反馈这五个重要环节来达成精确的角度控制伟创动力舵机,在整个运行的进程之中,只要有任何一个环节产生问题,就很有可能致使舵面失控这种严重后果,所以,要真正弄明白其工作原理图,关键之处就在于能够清楚地理得清这个闭环回路。
如果你想快速上手:
1. 找寻一张带有电位器标注的舵机内部结构的图,依据此图去拆解一个报废的舵机,运用行动动手寻觅出每一个零件所处的位置。
2. 动用示波器,或者借助逻辑分析仪,抓取一下PWM信号,亲自去看一看,1ms脉冲所对应的角度是什么样的,1.5ms脉冲所对应的角度是什么样的,2ms脉冲所对应的角度是什么样的。
3. 调整直升机舵机之际,一定要先去确认供电电压处于稳定状态,要去确认信号线连接得牢固,还要去确认摇臂安装角度跟中立位对齐。
不是亲手拆过、测过,绝不叫真正理解,将图上的线与符号,转化成你脑子里能够随时调用的动作流程伟创动力,这才算是学透彻了。























