



























TECHNICAL SUPPORT

发布时间: 2026-05-24
于机器人项目里,在机械臂项目中,于航模项目之中,舵机可是最为常见的执行部件。好多初次接触舵机控制之人,都会碰到同一个问题呢:明明代码已然写好了,然而舵机就是不转动到我所期望的位置,或者致使舵机来回不停抖动,出现角度偏差极大的状况。
事实上伟创动力舵机,舵机角度控制的关键所在,旨在借助微控制器去发送一个具备特定占空比的脉冲信号,也就是PWM。一旦弄清楚PWM信号同角度之间的换算关联,便能够轻易达成从0°至180°乃至更为宽泛范围的精确控制。接下来,以最为常见的180度标准舵机作为示例,直接给出能够运行的代码逻辑以及常见问题的解决办法。
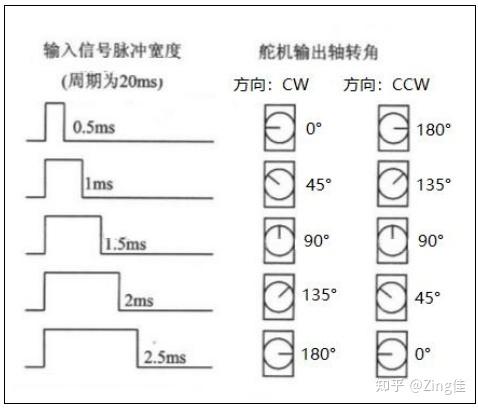
相当多数量的180度标准舵机,其控制信号所拥有的周期是20毫秒(也就是50Hz)。在这样的一个周期范围之内。
与0°相对应的脉冲宽度,一般而言是0.5毫秒,其所占有空比为2.5%。
九十度所对应的脉冲宽度,一般而言是一点五毫秒,此占空比为百分之七点五。
180°所对应的脉冲宽度,一般情况是为2.5毫秒,此占空比是12.5%。
不同品牌的舵机,有可能会存在细微的差异,比如说,有的舵机,其0°对应的是0.6毫秒,而180°对应的则是2.4毫秒 ,不过,这些都能够通过实验进行微调。记住这一比例关系之后,任意角度相应的脉冲宽度,便能够借助线性插值计算得出。
接下去的这段代码,属于实际项目里,在常常会被运用到的逻辑结构范畴,能够直接进行复制,而后放置于开发环境那边去开展测试。
#
Servo ; // 创建一个舵机对象
void setup() {
.(9); // 将舵机信号线连接到数字引脚9
}
void loop() {
// 将舵机转到0度
.write(0);
delay(1000); // 等待1秒
// 将舵机转到90度
.write(90);
delay(1000);
// 将舵机转到180度
.write(180);
delay(1000);
}
运用.write(角度)堪称最为直观的途径,库的底层会自行把角度换算成相应的PWM脉宽。要是有着更精准细腻的把控要求,可以径直采用.(脉冲宽度微秒数),比如说.(1500)所对应的是90°位置。
问题一:舵机抖动或位置不准
理由是,供电不足属于极为常见的状况。舵机启动的瞬间,电流相对较大,要是开发板的5V引脚直接实施供电,极易致使电压出现跌落现象,进而造成控制信号产生异常。
处理办法为,提议运用外部电源,像是6V电池组或者稳压模块,单独为舵机供应电力,把开发板跟舵机的GND进行共地就行。与此同时,核查控制信号线是不是接触状况良好。
问题二:角度超过180度或需要连续旋转
原因在于,普通标准舵机的机械限位处于一百八十度左右的量值范围之中,要是强行去写入超出这个范围的角度数值的话,那么就极有可能会致使舵机发生堵转的现象,甚至进而造成损坏的情况出现。
处理:要是项目要求进行360度不间断旋转,那就选用“连续旋转舵机”或者“360度舵机”。这种舵机借助不一样的PWM脉宽把控转速以及方向,而不是依靠绝对角度。比如说脉宽1.5毫秒时停止转动,脉宽1.3毫秒时以全速正向转动,脉宽1.7毫秒时以全速反向转动。
问题三:多路舵机同时控制时,响应变慢
缘由在于,多数舵机库运用软件方式来生成PWM信号,在同时对多个舵机实施控制之际,每个舵机都得依照次序去更新脉冲,如此一来,时间开销就会累积。
处理办法是:优先选用硬件PWM引脚,这种引脚通常被标记为~或者PWM,又或者采用专门的舵机控制板,比如模块,该模块借助I2C接口来控制,最多可控制16路舵机,它不会占用主控芯片的PWM资源,并且在同时控制多个舵机时伟创动力,依旧能够保持精准。
1. 编程之前要先进行测量,借助一个示波器或者逻辑分析仪,去测量你手上舵机实际所对应的0°脉宽值以及180°脉宽值。不同厂家生产的产品,其差异有可能达到0.2毫秒,而这会对角度精度产生直接的影响。
2. 供电要先行,需优先处理舵机独立供电的问题,要防止利用开发板的板载稳压器直接去驱动舵机。
3. 按循序渐渐调试:在首次进行调试之时,可不是直接就写入180°的。要先从0°、45°以及90°等处于中间的数值开始着手,在确定好舵机的响应情况正常无误之后,才可再往完整的范围去扩展。
控舵机角度之本质并非繁杂,只要明晰PWM脉冲宽度与角度的线性关联,解决供电以及信号干扰这两个核心问题,便可使舵机依你之指令精确转动。下次再遇舵机不依从之情形,不妨先查验此两点,大多问题皆能顺利解决。























