



























TECHNICAL SUPPORT

发布时间: 2026-03-30
你是否也曾碰到过这般状况:明明已给舵机接上了电,并且发送过指令,然而那个盖子却老是“差那么一点儿”就合不上,又或者开去到不了位?想要借助舵机达成一个自动开盖的超炫功能伟创动力,却让“怎么控制位置”这一难题给困住很长时间。别心急,就在今天咱们要来把“舵机怎样控制开关盖的位置”这件事情彻头彻尾地聊明白,我会一步一步带着你搞定这个看上去繁杂、实际却清晰明了的问题。
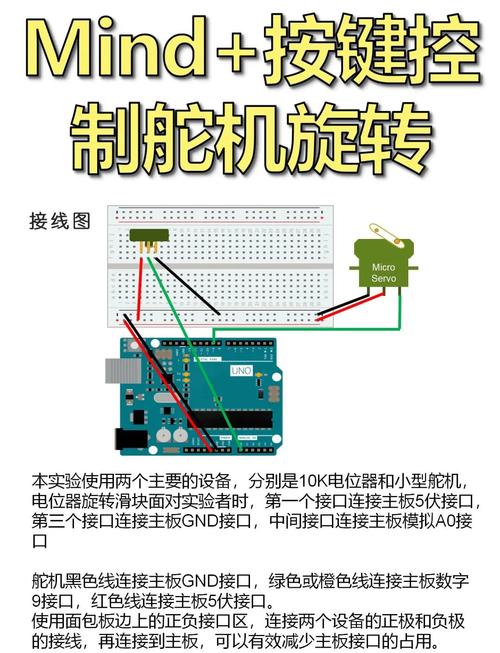
好多小伙伴拿到舵机后,第一反应便是直接通电,接着发现它要么一点都不动,要么不停地转动。实际上,你非常有可能忽视了极为基础的一步:信号线接对了没?舵机通常有三根线,分别是电源(红色)、地线(棕色或者黑色)以及信号线(橙色或者黄色)。信号线得接到能够输出PWM(脉宽调制)信号的引脚上,就像开发板的9号口那样。倘若随便接个普通IO口,它根本听不懂你要让它转到什么地方。
还有一个常见且会出现“没反应”状况的缘由是供电不足,你别看舵机的个头不大,然而其舵机里的电机在启动瞬间所产生的电流可不是个小数目,尤其是那种具备大扭矩的金属舵机,要是你仅仅依靠开发板之上的5V供电,极有可能压根带不动,进而致使舵机出现乱抖或者干脆不动的情况,在这种时候,你就需要一个独立的外接电源,像是5V的电池盒亦或是稳压模块均可,将电源的正负极以及舵机、开发板的共地(也就是GND连接在一起),如此这般舵机才能够“吃饱饭,有力气干活”。
完成硬件连接,关键环节登场咯:怎样凭借代码向舵机传达“给我转动到90度,将盖子开启”?咱们以最常被使用的环境为例来讲一讲。你仅仅需要运用这个库,它助力我们把繁杂的PWM信号计算给进行了封装。最先,你要去创建出一个舵机对象,接着在setup()函数当中,利用.(9)将信号引脚去绑定到9号口。
最为关键的指令便是.write(angle) 了,在此之中的angle即为你所冀求的角度,其范围是从0度至180度,你也许会思索,我究竟怎样才能够知晓盖子的“关”所对应的是0度还是180度呢,这就必然需要进行实际的测试,你能够编写一个小小的程序,让舵机从0度起始,每一次递增10度,去瞧瞧盖子运动至哪一个角度恰好是合上的,哪一个角度是打开到最大限度的。把这两个数值记录下来,这两个数值是你程序里“关”的关键位置点,这两个数值也是你程序里“开”的关键位置点。
在着手正式开展编程工作之前,存在一个极易踏入陷阱的地方,那便是舵机的初始位置。当你进行舵机安装操作时,其初始位置呈现出随机的状态。要是你径直编写程序令其转动至90度,那么有可能盖子尚未完全打开到位,舵机臂就已然撞上外壳了,这不但无法成功打开盖子,还有可能致使舵机齿轮遭到损坏。所以说,明确“零点”位置是极为关键的一项步骤。
一般常见的做法是,要将连着舵机之处的舵机臂给拆卸下来,接着再进行通电操作,运用.write(0) 或者.write(180) 的方式,使得它朝着某个存在极限的位置转动。随后,在处于这种状态时,把盖子去合拢起来,之后再把舵机臂依照你所期望的受力指向重新装配回去。如此一来,你所设定的“关”的位置便会与舵机的物理方面的极限相互对应起来了。其后借助.write(90)去对“开”的位置予以测试,接下来你会发觉运动轨迹变得可控许多了。在此过程当中,简单来讲就是让机械结构与程序逻辑有了“共识”。
要能够顺畅地操控开关盖,在硬件连接方面,除了舵机、开发板以及电源之外,你一般情况下还需要一些“辅助的参与者”。比如说存在一个按键,其作用是用于手动引发开盖的动作;又或者是有一个传感器,像是红外避障传感器,当检测到有物体靠近时就会自动进行开启。在进行接线时,按键的一端连接开发板的某个数字引脚,另一端连接GND,借助内部上拉或者外部电阻来读取信号。
对于电源部分而言,其表现出的重要属性尤为突出。你需要针对这一情况进行相关计算:你所使用的舵机,其工作时的电流具体数值是多少呢?要是你选用的那种舵机乃是9g小舵机,通过USB进行供电的话,在特定条件下勉强能够维持其运行状态;然而,要是你所采用的舵机是这种具备大扭矩特性的舵机,那么就必然得借助外接电源来保障其正常工作。并且,在此特别提醒你,一定要将对应开发板的GND以及舵机外接电源的GND连接在一起。一旦遗漏了这个被称为“共地”的步骤,信号便无法进行传输了,进而舵机就会呈现出如同失去控制一般的乱动现象,所以这个步骤在硬件连接过程中可算是犹如极为重要的准则一样了。
不少朋友发觉,运用write()指令虽说能使舵机转动舵机厂家伟创动力,然而总觉得“开”和“关”的位置并非足够精准,相差几度,盖子便无法严实合拢,在这个时候,你得知晓一种更加精细的控制办法,即直接操控PWM脉冲宽度。虽说库函数便捷,不过有时会因舵机自身的误差舵机品牌伟创动力,致使你所设定的角度与实际角度存在偏差。
你能够试着运用()这个指令,标准舵机是以90度对应1500微秒的脉冲,0度对应500微秒,180度则对应2500微秒。只是每个舵机都存在些别具一格的“独特点”,你能够借助测试寻觅最契合你盖子的脉冲值。举例而言,将数值从1450微秒缓缓加以提升至1550微秒,观瞧哪一个会使得盖子闭合得最为完美且毫无缝隙现象出现此现象。这种微调状态,好似为你给予了“毫米级”的刻度量具,致使你能够精确去把控盖子的每一回开合角度,进而营造出真正柔顺畅缓的产品感受,产生出切实平滑流畅的产品体验。
我们来谈谈选型,这对项目能否稳定运行起着决定性作用。扭矩是首要考虑因素。你得进行估算,开关盖所需的力究竟有多大?要是盖子是轻巧的小型盖子,9g塑料舵机就足够用;一旦盖子存在一定重量,或是有弹簧阻力,那就得挑选具有带有金属齿轮的舵机,像15kg/cm扭矩的舵机,以此来确保每次都能够稳稳当当地合上,不会在中途出现卡住的情况。
还有一个关键参数是电压以及尺寸,你得保证你的电源系统能够供给舵机所需要的电压,像好多舵机是由4.8V到6V来供电的,要是使用3.7V的锂电池说不定就带不动。与此同时,可别忘了查看尺寸,你的设备内部空间能不能放置这个舵机呢。“扁舵机”或者“塑胶壳标准舵机”都存在不一样的外形尺寸,预先量好安装孔位,能够防止硬件无法安装的尴尬情形。
看到这儿,想必你针对“舵机怎样控制开关盖的位置”已然拥有了一个自硬件至代码、从理论到实操的完备思路。此刻动手去尝试一番吧 ,哪怕是从最为简单的按键控制开合着手 ,你也能够即刻体会到那种发自内心的创造乐趣。顺带一提 ,你于调试舵机位置之际 ,碰到过最令你感到头疼不已的问题是角度调整得不准确 ,还是硬件动不动地就出现被烧掉这种状况呢?欢迎于评论区分享你的相关经历 ,咱们一块儿进行交流 ,协同进步!























