



























TECHNICAL SUPPORT

发布时间: 2026-04-19
可以精确控制旋转角度的小型执行器是舵机,简单说,则是:你告知它“转到 30 度”,它便会自行转到位且停在所到之处;你再告知它“转到 90 度”,它同样能够精准抵达。机器人关节、航模方向舵、智能小车转向等场景常常用到它。
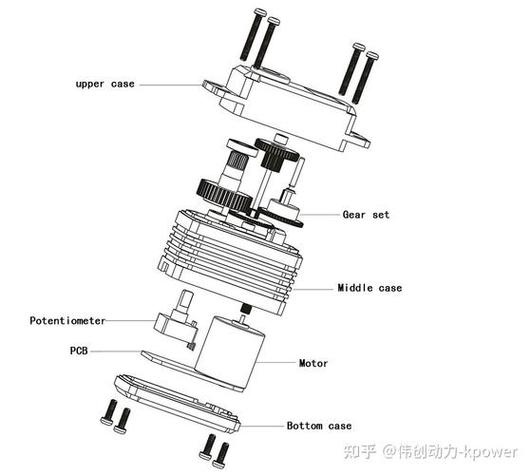
舵机主要由以下5个部分构成,缺一不可:
真正将一个平常的航模舵机拆开,你便会瞧见:有一个小型的电机,它连着一串按照顺序逐渐变大的齿轮,那些齿轮的末端引出了一根输出轴,在其旁边存在着一小块电路板,而在电路板上连接着一个会与输出轴产生联动的电位器。
舵机运用闭环控制方式来运行,其核心逻辑性表现为,由目标角度减去实际角度,从而得到差值,再来依照该差值针对舵机运行做出调整动作,最终达成目标角度与实际角度达成一致的状态具体有以下这样三步:
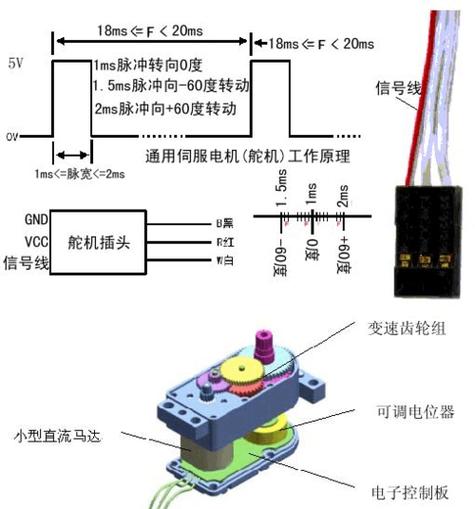
信号线,一根被舵机用于接收PWM信号(脉冲宽度调制信号)。标准舵机,其控制周期是20ms,当中:
脉冲宽度 0.5ms → 对应 0度
脉冲宽度 1.5ms → 对应 90度
脉冲宽度 2.5ms → 对应 180度
譬如有这样一个事例:你期望机器人的手臂摆动至90度,此时控制板便会持续地向舵机发送脉冲宽度是1.5ms的信号。
控制电路板同时做两件事:
解析PWM信号,得出目标角度(如90度)
读取电位器返回的当前实际角度(比如现在是30度)
电路板算出了角度的差值:这个数值是 90°减掉 30°,结果等于 60°伟创动力,并且是需要按照顺时针的方向去转动 60 度。
如果目标角度 > 实际角度 → 控制电路让电机正转
如果目标角度 < 实际角度 → 控制电路让电机反转
电机通过减速齿轮组带动输出轴旋转,同时电位器不断更新角度值
一旦实际角度同目标角度达成相等状态,控制电路即刻让电机停止运转,同时维持当前所在位置处于静止不动的情形。
这好似你拿手动去转动一个旋钮,眼睛如同电位器那般,始终注视着当下刻度,大脑恰似控制电路,去比较目标刻度,手仿若电机,持续进行调整,一直到对准才停止。
案例1:航模飞机的方向舵
在你对遥控器上摇杆进行拨动操作(例如实施打右舵动作)时,接收机将会朝着舵机发送与之对应的具有特定宽度的 PWM 信号。舵机的输出轴会带动连杆,进而拉动垂直尾翼朝着右边进行偏转,如此一来飞机便会朝着右边转弯。当摇杆回归到中间位置时,舵机也会自动回归到中间位置。
案例2:六足机器人的关节
为每一个腿关节都安装上一个舵机,主控芯片依照顺序逐个给各个舵机去发送不一样角度的信号,让舵机逐个转到指定的位置,如此一来机器人便能够达成行走、转弯诸如此类的复杂动作。不需要你自己来控制电机的启动与停止,舵机内部自动予以完成。
舵机并非那种简单的,仅仅是“通电就转”的平常电机,而是一个自身带有控制器以及角度传感器的智能组件。它的构成能够归纳为,那就是:电机加上减速齿轮,再加上控制电路,还有反馈电位器。它的工作原理其本质属于闭环角度控制,分几步是这样的:接收PWM指令,接着对比当前角度,随后驱动电机,等到到达目标后便会自锁。
如果你想实际使用舵机:
1. 要去确认一下类型伟创动力舵机,究竟是那种标准舵机,也就是角度范围在0180度的这一种,还是360度能够连续旋转的那种舵机呢?前面提到的那种标准舵机是被用于进行定位工作的,而后面所说的那种360度连续旋转舵机则是被用于速度控制方面的。
2. 通过、STM32或者树莓派,去学PWM信号,以20ms为周期,输出0.5至2.5ms的高电平脉冲,这样就能完成控制。
3. 留意电源,舵机开启瞬间电流较大,一般处于0.5至2A范围,建议将其与控制板分开供电,以防电压跌落致使重启。
4. 选型存在三个要素,分别是扭矩,其单位为千克厘米,速度,以秒每六十度来表示,以及工作电压,常见范围是四点八至七点四伏,需依据您的负载以及响应要求去进行选择。























