



























TECHNICAL SUPPORT

发布时间: 2026-04-18
直白来讲,舵机驱动函数乃是一段供舵机“瞧”的指令代码 ,其最关键的功能是 将您期望舵机所转向的角度 (像0度、90度亦或是180度) ,转变为舵机能理解的控制信号。
那就来举个例子:你期望手臂能够抬升至水平位置,也就是目标角度;此时大脑,相当于单片机,会经由神经伟创动力舵机,也就是信号线,朝着手臂肌肉,即舵机,发送一条具体的指令,这条指令是“收缩到某个特定程度”,这就是驱动函数。而舵机驱动函数,就是那个精准的“收缩到某个程度”的指令。
不存在这个函数,舵机犹如没接到命令的士兵,迷茫不知该做何事,深入认识它,乃是把控舵机编程的起始之举,是迈向舵机编程掌握技能之旅途的首要步骤。
分别是,初始化舵机,设置舵机信号初始状态,以及根据控制指令调整舵机角度,这就是一个标准舵机驱动函数不论在何种编程环境下,本质上都要去完成的三个连续任务。
1. 接纳目标视角:函数将接纳一个由你所指定的角度数值,举例来说,90(此为表示90度之意)。
2. 计算与之对应的脉冲,舵机的位置是由脉冲宽度来决定的,而脉冲宽度通常处于0.5ms到2.5ms这个范围。在函数内部,会把0 180度的范围,进行线性映射,映射到0.5ms 2.5ms的脉冲宽度范围。比如说,90度对应的是1.5ms的脉冲。
3. 持续输出信号,函数会对单片机的一个引脚加以控制,以每20毫秒一次也就是50Hz的频率,持续输出已然计算好的脉冲信号,只要信号不间断,舵机就会稳固地保持在指定位置。
针对权威原理进行验证,标准模拟舵机的控制协议情况如下,其周期为20ms也就是50Hz,高电平时间处于0.5ms至2.5ms之间,这二者分别对应着90°至+90°,或者是0至180°,这要依据舵机型号来确定。这属于舵机控制领域的行业标准,所有兼容的舵机都是遵循此规范的。
就为了能够让你更加具有直观性地去理解,我们来瞧一瞧一种最为平凡、最为基础的驱动函数的实际示例,此示例是以环境作为例子的,不过并非专门针对任何特定品牌而言的。
你写的代码(驱动函数的调用)通常是这样:
// 假设我们已经设置好舵机对象,并命名为 ''
.write(90); // 这就是一个最经典的舵机驱动函数调用
delay(1000); // 等待1000毫秒
背后的驱动函数(简化逻辑)实际做了这些事:
1. 检验角度:接收到了数值90 ,它会去查验这个数值是不是处于允许的范围之内(像是0至180),要是超出了,那就限定在边界值。
2. 执行映射公式,计算脉宽,脉冲宽度(ms)以这样的方式得出,即等于0.5加上角度除以180所得到的结果再乘以2.0,代入90这个角度进行计算,得出0.5与0.5乘以2.0的运算和为1.5ms。
3. 制作信号,于后续的二十毫秒周期之内,使信号线起初维持高电平一点五毫秒,接着维持低电平十八点五毫秒,之后持续重复这种“高至低”的循环状态。
4. 情况是这样的,舵机接收到了这个持续不停的1.5ms脉冲信号后,其内部的比较器会察觉到,目标脉冲也就是1.5ms,等于当前反馈脉冲,这里假设之前停在0度对应的是0.5ms,于是,驱动电机开始正转,通过齿轮减速组带动输出轴进行旋转,直等到反馈脉冲也变成了1.5ms,电机才停止。在这个时候,舵机的输出轴就精准地停在了90度位置,并且持续保持下来。
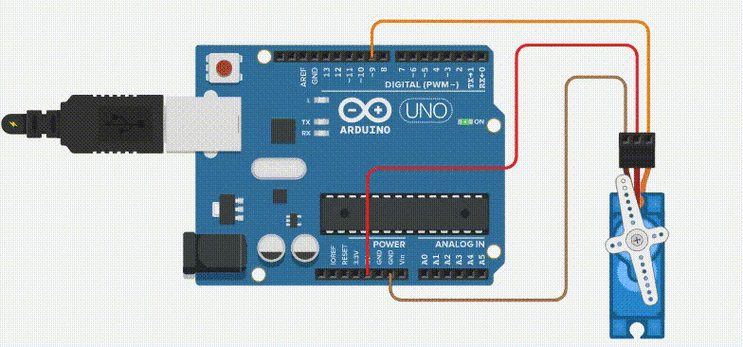
经验讲述:好多刚开始学习的人会感到疑惑“为何舵机出现抖动或者不准确的情况呢?”最为常见的缘由便是供电不够充足或者没有实现共同接地。要保证舵机的电源(一般是5V)以及单片机的地线(GND)稳固地连接在一块儿。
对于“舵机驱动函数”这个概念而言,因你所用的库存在差异伟创动力,或者底层代码有所不同,它能够呈现出多种多样的形式,然而其核心之处始终都是,输出具有特定宽度的脉冲。
核心观点再次强调:不管形式怎样进行改变,舵机驱动函数的原本性质始终未曾变化,它属于一个“角度到脉冲”的转换器,并且承担着稳定输出此脉冲信号的职责。明白了这个本质,你便握住了舵机编程的关键所在。
按照上面所做的分析来看的话,要是你期望能够迅速以及可靠地去把持住舵机驱动函数的话,那么建议你依照下面所讲的步骤来采取行动:
1. 即刻着手实践:找一块儿开发板(不论何种品牌)以及一个标准舵机。运行最为简单的 servo.write(0) 函数,运行 servo.write(90) 函数,运行 servo.write(180) 函数。亲眼去观察并且记住这三个角度所对应的物理位置。
2. 做一回小型实验,试着运用for循环以及servo.write(i)函数,促使舵机由0度顺畅地扫至180度,而后再扫回来。这种情况会使你深切领会“连续控制”的意义。
3. 对于一个实际问题的解决:要是你的舵机于某个角度表现出剧烈抖动的情况,那么要去检查是不是电源方面的问题呦(借助万用表丈量一下舵机正负极的电压是不是稳定处于5V)。要是并非如此呢,那就再度开展检查,查看代码之中是不是存在其它任务使得脉冲的准时输出遭到了阻塞呀。
4. 形成完整知识树,要把“舵机驱动函数”,与“PWM(脉冲宽度调制)”关联起来学习,还要与“闭环控制”关联起来学习,并且要与“PID(比例 积分 微分)”关联起来学习。
结论:舵机驱动函数乃是你同物理世界运动交互之际的堪称“翻译官”以及“执行官”般的存在。 一旦掌握了它,你便具备了能使机械精准动起来的基础能力。此刻,就着手去撰写你的首段 servo.write(90) 代码,亲眼目睹角度的精准控制吧。























