



























TECHNICAL SUPPORT

发布时间: 2026-04-24
对伺服舵机与普通舵机(一般所讲的标准航模舵机)来讲,其核心区别是这样的:伺服舵机拥有闭环控制以及位置反馈能力,它能够精确地执行抵达指定角度的指令;普通舵机大多是开环控制,依靠脉冲宽度调制信号进行大致定位,其精度以及反馈能力比较弱。要是你正在制作机械臂、人形机器人或者需要具备重复定位精度的自动化设备,则选择错误的舵机就会致使抖动、过冲、发热甚至是直接损坏。
为了帮你完全弄明白两者的关键不同之处以及适用的场景,下面在工作原理、控制信号、精度、寿命以及成本这五个方面伟创动力舵机,逐个进行剖析。
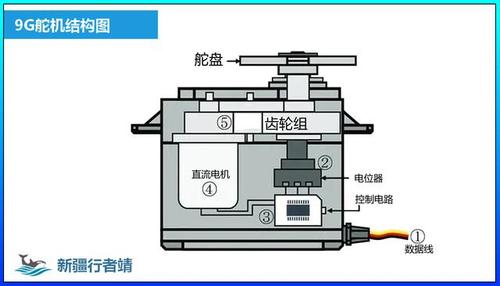
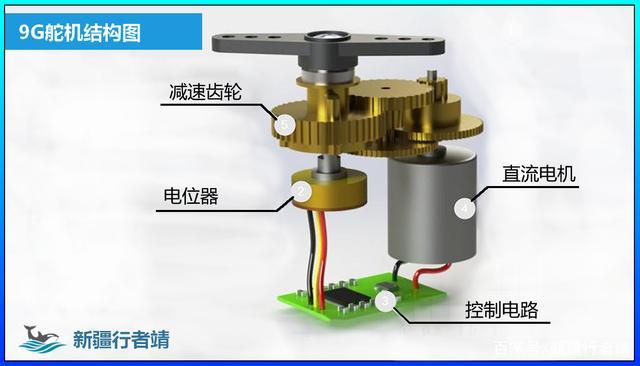
普通舵机,其内部是由直流电机组成,且还有减速齿轮组,另外包含电位器。控制芯片能够检测电位器电压,凭借此来判断当前角度。当输入的PWM信号和电位器电压并不匹配的时候,电机会开始转动起来,直到二者匹配才会停止。这属于一种半开环控制,并没有独立的编码器反馈。
伺服舵机: 在普通舵机基础上,增加了磁编码器或光学编码器,构成全闭环控制。控制芯片实时读取编码器的绝对位置,与目标指令对比后,通过PID动态调整电流、速度和方向。即使受到外力干扰,伺服舵机也会自动修正回目标位置。
常见的案例呈现为:当你的航模方向舵被风吹得发生偏移的时候,普通的舵机没有办法感知如此的偏移情况,仅仅会“呆呆”地去执行原初的 PWM 指令。用于机器人腿部的那个伺服舵机情况则不同,要是它被障碍物卡住 3 度,它会马上加大电流强行去回正,并且会通过数据总线向主控发出报警信号。
一般的舵机,有着典型的三线接口,那是供能的电路线(颜色为红色)、接地的线路(颜色是棕或者黑)、传递信号的线路(颜色为橙或者黄)。仅仅一个引脚伟创动力,只能够操控一个舵机。要是存在想要操控二十个关节的情况,那么主控便需要二十个PWM引脚,线束数量极多。
有这么一种设备,它叫伺服舵机,该设备并非仅做到兼容PWM这种模式,而是在高端型号方面,会提供RS 485或者CAN总线接口。对于所有的舵机而言,它们都是并联在同一对数据线上的,并且是依靠地址ID来进行区分的。比如说,存在一套人形机器人,其有着32个关节,仅仅只需要4根线,分别是电源、地、和数据A、数据B,就这样便能够将其各个关节全部控制住,与此同时,还能够对速度进行批量设置以及实现同步动作。
实际情形是:制作一个具备6个自由度的机械臂,采用普通舵机,此时你需要用到6个PWM引脚,在程序当中要分别去对每个舵机的脉冲宽度进行计算,并且没办法实现统一归零,而要是使用CAN总线伺服舵机,仅仅只需一条指令(ID等于3,Angle等于90,Speed等于50)就能够使得3号关节以50的速度转动到90度。
根据以下三个问题快速判断:
试问是否需要将角度数据进行回读呢,比如说当机器人出现摔倒状况后想要实现自动复位,那么主控必然是需要知晓每个关节当下所处的角度的,普通的舵机是没办法予以提供的,所以要选择伺服舵机。
是否对于成本具备敏感性并且精度方面要求处于较低水平呢?应用于小车转向、升降杆、炮塔这些仅仅要求“转动到大致位置”的场景之中。普通的舵机就可以了 → 选择普通舵机。
是不是得长时间维持力矩呢?比如说机械臂得悬着托举二百克的物体三十秒。一般的舵机会出现过热保护或者抖动的情况,而伺服舵机能够自动补偿电流,所以选择伺服舵机。
误区一:“数字舵机就是伺服舵机”
错,数字舵机是那种运用MCU去处理信号的,其响应会更快,然而要是没有编码器反馈的话,它依旧是属于普通舵机的范畴,没办法回读位置。
误区二:“用高精度电位器可以替代编码器”
不行。电位器属于接触式测量方式,反复运用会引发磨损以及信号噪声的情况,进而致使零点漂移。而伺服舵机所采用的磁编码器属于非接触式的,从理论层面来讲不存在磨损现象。
误区三:“普通舵机加装外置角度传感器也能闭环”
技术层面存有可行性情形,然而需要额外的ADC引脚,并且主控得自身去编写PID,在实时性方面很难达成舵机内部微秒级别的响应,其结果常常比不上直接去购买集成好的伺服舵机。
1. 假使你的项目涵盖:仿生机器人,竞赛机械臂,伴随机器人,全向轮小车(要求精确直线行走),工业自动化模组 → 那就径直选取带CAN总线或者RS485接口的伺服舵机。虽说单价兴许比普通舵机贵3至10倍,然而能够节约90%的调试时间以及返修成本。
2. 要是你的项目涵盖泡沫航模,以及遥控车转向,还有简易玩具,并且包含升降装置,同时是成本低于500元的DIY套件,那么选择标准普通数码舵机就行,不过要留意降低对重复精度的预期。
3. 方案唯一可折中存在的情况是,对于那种精度要求处于中等程度(±1°是能够被接受的范围),预算的金额方面有所限制,然而在场景方面却是有着需要反馈这一要求的情况。在这种状况下能够去选择带有电位器反馈的模拟舵机,不过在选择之后要做好准备,准备的内容是每运行200小时就要进行一次校准零点的操作。
一下核心结论,要是需要精准地晓得“转到哪里了”并且能够自动进行修正,那就选择伺服舵机;要是仅仅只需要“大致转到那个方向”而且对成本比较敏感,那就选择普通舵机。在2026年的技术环境的状况下,除非是那种成本极低的教育套件或者一次性,要不然建议最好优先去考虑伺服舵机,特别是总线型伺服舵机,这可是机器人达成稳定、智能控制的那个最低门槛。























