



























TECHNICAL SUPPORT

发布时间: 2026-05-10
您有没有碰到过舵机出现不转动、胡乱转动或者没办法精准控制角度的状况呢?控制舵机实现转动实际上是存在标准方法的,在本文当中直接给出最为核心的结论:舵机转动的角度以及方向,是由输入信号线上特定周期的PWM信号也就是脉宽调制信号的高电平时间也就是脉宽精确决定的。只要掌握了这个原理,并且依据下文所讲的步骤去进行操作伟创动力舵机,您就能够在几分钟之内让舵机按照需求进行转动。
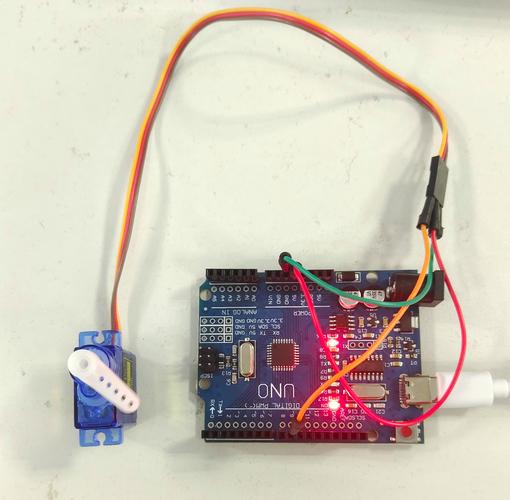
大部分舵机,其中涵盖常见于机器人、航模、小车上的标准舵机,均具备三根引线,其颜色以及功能是固定的。
棕色或黑色线:电源负极(GND),接控制系统的地。
带有红色标识的线,它所连接的是电源的正极,也就是VCC,而标准舵机的供电电压,一般情况下是处于4.8V至7.4V这个范围之内的,这里要以您所使用的舵机上面所标注的标签内容作为依据。需要特别留意的是,舵机在启动的瞬间,其电流能够达到1 2A,所以一定要保证电源能够提供充足的电流,不然的话,舵机就有可能出现抖动的情况,或者根本就不转动了。
橙色或黄色线:信号线(PWM输入),接收控制信号。
案例:有爱好者把红色线径直接到5V单片机IO口,致使电流不够,舵机仅发热却不转动 ,这属于常见接线错误。正确做法是:要把红色线以及棕色线连接到独立电源 ,像4.8V镍氢电池组又或者是稳压后的5V/2A适配器 ,信号线连接到控制器IO口 ,并且要把控制器GND和电源GND进行共地。
这属于极为常见的那一类舵机,其转动角度跟PWM脉宽呈现一一对应的关系,PWM信号参数是固定不变的。
周期:20ms(频率50Hz)
高电平脉宽存在一个范围,这个范围是从0.5ms开始,一直到2.5ms,而此范围对应着0°到180°。
脉宽 0.5ms → 0°(最左或最右,取决于舵机型号)
脉宽 1.0ms → 45°
脉宽 1.5ms → 90°(中间位置)
脉宽 2.0ms → 135°
脉宽 2.5ms → 180°
具体操作步骤如下,以常用开源电子原型平台作为例子,此步骤不涉及具体品牌。
1. 将舵机信号线连接到控制器的任意PWM输出引脚。
2. 使该引脚于代码里被初始化成PWM输出模式,将PWM频率设定为50Hz(周期为20ms),是这样做的。
3. 算出目标角度所对应的脉宽数值,其公式为,脉宽以毫秒为单位的时候等于0.5加上角度除以180再乘以2.0伟创动力,比如说在角度为90°时对应的脉宽值是1.5ms。
4. 给出那个对应脉宽的高电平信号,在除此以外不相同的其他时间呈现为低电平这种情况,持续不断地进行输出,如此这般就能够使得舵机转动到并且维持住那个角度。
5. 如果需要持续不断地改变角度,那么每隔超过20毫秒的时间更新一次脉宽,(这里建议在20毫秒到50毫秒这个区间内进行更新)。
真实存在的案例来讲,对处于操控状态的舵机而言,使其从角度为零的状态开始,以比较缓慢的速度朝着角度为一百八十度的方向进行转动,能够每隔五十毫秒就增加一度的脉宽这个数值,以此来模拟出那种较为平滑的运动情况。有一位航模爱好者,运用了这样的一种方式,达成了相机云台的匀速扫描这一效果。
留意,持续转动的舵机没办法操控确切角度,仅仅能够操控转动的方向以及速度。其本质是一个带有闭环功能的减速电动机,PWM信号的含义存在差异:
脉宽 1.5ms → 停止转动
脉宽小于1.5毫秒时,会朝着一个方向进行旋转,脉宽越狭窄(最小为0.5毫秒),那么转速就会越快。
脉宽大于一点五毫秒时,会出现反向旋转,脉宽的程度越宽,这里所说的最大宽度是二点五毫秒,那么转速就会越快。
信号周期为20ms的PWM信号,其输出方式为控制方法,通过改变脉宽来调整转速与方向。举例来说,当脉宽是1.3ms时,舵机便会按照中速顺时针旋转运行(当然,具体的旋转方向是由舵机出厂时的定义所决定的)。若要使其停止转动,就精准地输出脉宽为1.5ms的信号。
常见有误区域:好多人错误地觉得,那连续旋转的舵机,能够如同标准舵机那般转到特定的角度,然而这是不对的。要是您有精确位置控制的需求,那就选用角度范围是0到180°或者0到270°的角度式舵机。
不管运用哪一种控制器,其核心在于生成频率为50Hz、脉宽能够调节的方波,以下这般是三种常见的达成方式(全都不依靠特定品牌):
代码示例(逻辑伪代码,可直接移植到各类平台):
// 假设已初始化PWM引脚,频率50Hz
// 定义一个函数,输入角度(0~180),输出对应脉宽
void (int angle) {
// 脉宽范围 0.5ms ~ 2.5ms
float = 0.5 + (angle / 180.0) 2.0;
// 设置PWM比较值(具体函数根据平台不同,核心为 /20ms 占空比)
( / 20.0 * 100);
}
根据大量常见问题案例,90%的舵机控制失败由以下原因引起:
1. 电源所提供的电流处于不足的状态:舵机在出现转动这个情况 的时候,电流能够达到几百毫安,甚至是2A,要是采用USB供电的方式或者小容量的电池,舵机仅会产生抖动。解决的办法是:运用2A以上输出程度的稳压电源,又或者是18650电池组。
2. 存在信号电平不匹配的现象,部分舵机对于信号高电平有着≥3.3V的要求,然而有些旧型号的舵机却需要5V,要是您运用3.3V的控制器去驱动5V的舵机,那么有可能无法被识别,解决的办法是,采用电平转换电路或者选用宽电压舵机。
3. PWM周期偏差超出合理范围:其所占时长并非精准对应的20毫秒(像实际情况中可能仅为10毫秒或者达到30毫秒),在此状况下舵机就会出现极为异常的尖叫现象或者呈现出胡乱转动的情形。解决方法为:借助示波器或者逻辑分析仪来核查输出频率是不是处于50Hz±1%的范围之内。
4. 脉宽范围超出了零点五至二点五毫秒:要是输出脉宽小于零点三毫秒以及大于二点八毫秒,舵机内部电路有可能进入保护或者过载状态。解决办法是:在代码里面限制脉宽处于合法范围。
5. 存在共地缺失的问题,即控制器的GND与舵机电源的GND没有去进行连接,进而导致信号缺少参考回路,解决办法是使用导线把两者的GND直接连接在一起。
如下是核心观点:需重复记忆,控制任意标准舵机转动,仅需于信号线上输出周期为20ms(即50Hz),脉宽处于0.5ms至2.5ms的连续PWM波。脉宽精准地决定角度(针对标准舵机而言)或者速度方向(针对连续舵机而言)。电源要独立,且电流要充足,信号地与电源地实现共地。
立即行动建议:
1. ,取出一个已然知晓其处于完好无损状态的标准舵机,比如说型号为0至180°的那种,接着,依据本文所呈现的接线图,去连接独立的5V/2A电源以及任何能够输出PWM的开发板。
2. 第二步:去编写一个简单的程序,要输出1.5ms脉宽,此脉宽对应90°中位,接着去验证舵机是不是转到中间位置。要是这一过程成功了,那就表明所有硬件以及信号都是正确的。
3. 第三步,按顺序输出脉宽为0.5ms的情况。接着,输出脉宽为1.0ms的情况。然后,输出脉宽为2.0ms的情况。随后,输出脉宽为2.5ms的情况。之后,观察舵机是不是转到了对应的角度并且保持静止不动。
4. 第四步,要是应用于连续旋转舵机,那先要把1.5ms输出用以确认停止,接着逐步地减小或者增大脉宽去观察转速的变化。
依据上述所提及的步骤去进行操作,您将会在15分钟时间之内独立自主地达成舵机的精准控制。要是碰到问题的话,那就请回过头去查看第五节的检查清单,逐个地去排除。























