



























TECHNICAL SUPPORT

发布时间: 2026-05-25
好多电子爱好者,在头一回做舵机仿真时,都会碰到电机转也不转、角度不正确、程序烧录完没反应等平常问题。这篇文章会从最开始,教你怎样在软件里达成舵机的仿真搭建跟调试,保证你能够迅速上手,且顺利达成舵机的角度控制。
软件是一款流行的用于电路仿真的软件,它支持单片机与外围设备共同进行仿真。舵机仿真调试,说的是在里搭建一个完整的仿真环境,这个环境包含舵机、单片机控制电路以及程序,通过调试PWM信号与程序逻辑,去验证舵机的角度控制是不是准确。
像机器人关节控制,云台摄像头转向,舵机测试等,这些都是常见的应用场景。借助仿真,在不连接实际硬件的状况下,你能够提前去验证控制逻辑,进而避免出现烧坏硬件的情况。
在开始仿真前,请确保你已准备好以下内容:
1. 软件,建议选用 8.0以及更高的版本,其内部设置有舵机库。
2. 单一芯片计算机,常常会用到,还有STM32等等,在这个例子当中,是以作为示例的。
3. 在里具有自带的SERVO,此处于Pick > SERVO这个位置,它属于舵机。
4. 可以用于编写以及编译单片机程序的编程工具是,Keil C51或者MDK。
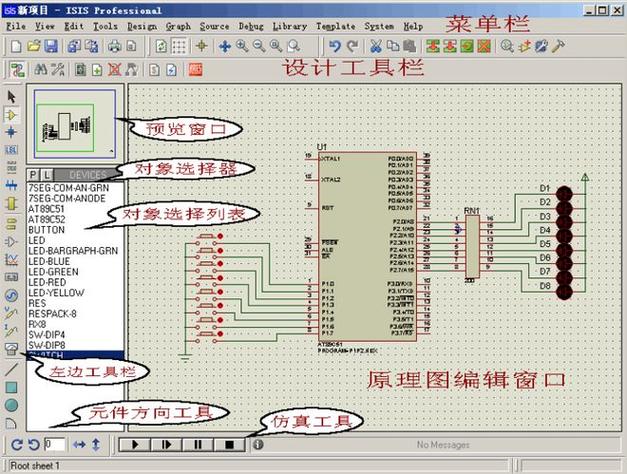
1. 打开,新建工程。
2. 点触P(即Pick )伟创动力,逐个添入如下元件:
(单片机)
SERVO(舵机)
晶体振荡器,其频率为11.0592兆赫兹或者12兆赫兹 ,名称为。
CAP(电容,30pF两个,用于晶振)
RES(电阻,10kΩ,用于复位)
POWER(VCC,5V)
(GND)
3. 按如下方式连接电路:
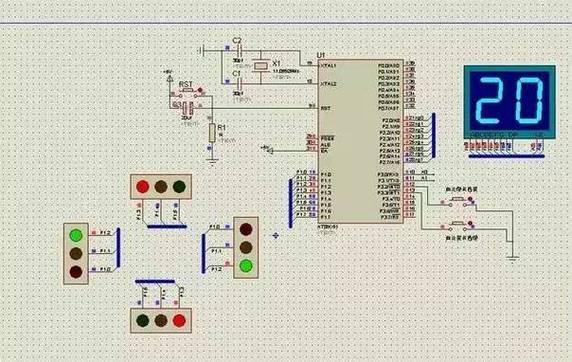
晶体振荡器的两端,分别连接单片机的XTAL1以及XTAL2的接口处,各自接上一个30pF的电容,直至连接到GND这个位置。
先将复位引脚RST连接10kΩ电阻,使其与GND相连,与此同时连接一个接到VCC的10μF电容,此为上电复位。
舵机信号线(SIG)接单片机P1.0(或其他I/O口)。
舵机电源线(VCC)接5V,GND接GND。
单片机VCC接5V,GND接GND。
舵机角度的控制,是依靠PWM(脉冲宽度调制)信号来达成的。标准舵机(像SG90这类)的控制周期设定为20ms伟创动力舵机,脉宽处于0.5ms至2.5ms这个范围时,所对应的角度是0°到180°。
以下是一个,用于控制舵机,使其旋转到,九十度的,简单的程序。
#
sbit servo = P1^0;
void ( int us) {
while(us) {
_nop_();
_nop_();
}
}
void ( int ms) {
int i, j;
for(i = 0; i < ms; i++)
for(j = 0; j < 110; j++);
}
void ( int angle) {
// 脉宽计算:0°对应0.5ms,90°对应1.5ms,180°对应2.5ms
// 假设12MHz晶振,1ms约1000个机器周期
// 简化:使用延时函数模拟脉宽
int pulse = 500 + (angle * 1000 / 180); // 脉宽微秒数
servo = 1;
(pulse);
servo = 0;
(20000 pulse); // 周期20ms
}
void main() {
while(1) {
(90); // 旋转到90°
(1000); // 保持1秒
}
}
在Keil里创建新的工程,选取,撰写上述的代码,进行编译,进而生成.HEX文件,这一过程叫做编译与生成.HEX文件。
1. 返回到,双击单片机,于弹出的属性窗口里,寻觅 File,挑选刚才所生成的.HEX文件。
2. 轻触左下方的运行按钮,也就是那个播放图标,随之开启仿真。
3. 观察舵机指针是否转动到指定角度。如果无反应,检查:
晶振频率是否与程序中一致
复位电路是否正确
舵机信号线连接是否正确
针对那些有着高精度要求的场景而言,给出的建议是运用单片机定时器中断去生成PWM信号。下面所呈现的是一个借助定时器T0来产生20ms周期PWM的示例核心代码:
void () {
TMOD = 0x01; // 定时器0,模式1(16位)
TH0 = (65536 200) / 256; // 每200μs中断一次
TL0 = (65536 200) % 256;
ET0 = 1;
TR0 = 1;
EA = 1;
}
于中断服务的程序里面,借由计数去控制舵机的脉宽以及周期,能够达成更为稳定的控制效果。
核心要点是,舵机仿真调试,其本质乃是去验证PWM信号以及单片机控制逻辑的正确性,关键之处在于,电路搭建要准确,程序脉宽计算不能有误。
行动建议:
1. 按照本文所阐述的那样,先去搭建基础电路,接着加载示例程序,然后观察舵机将旋转至90°。
2. 把程序里的角度值予以修改,对不同角度(像是0°、45°、180°)的控制效果展开验证。
3. 尝试使用定时器中断生成PWM,提升控制精度。
4. 向着更深层次拓展成为多舵机操控,或者跟传感器联合进行调试进程,以此模拟机器人关节的动作表现。
不通过真实购买舵机,借助仿真调试,你能够把舵机控制原理迅速掌握,为后续硬件开发奠定坚实基础。坚持“先仿真然而后实做”的原则,试错成本能够被有效降低,开发效率能够得以提升。























