



























TECHNICAL SUPPORT

发布时间: 2026-04-08
这是一份专门针对舵机的,完整的技术参考手册,本文档适用于机器人开发者,此外它也适用于电子爱好者,还适用于系统集成工程师,它能够帮助您快速掌握该舵机的核心规格。它还能帮助您掌握该舵机的接线定义,它也能帮助您掌握该舵机的控制模式以及故障排查方法,基于大量实际应用案例整理而成,因而以下内容可解决95%以上的选型与调试问题。
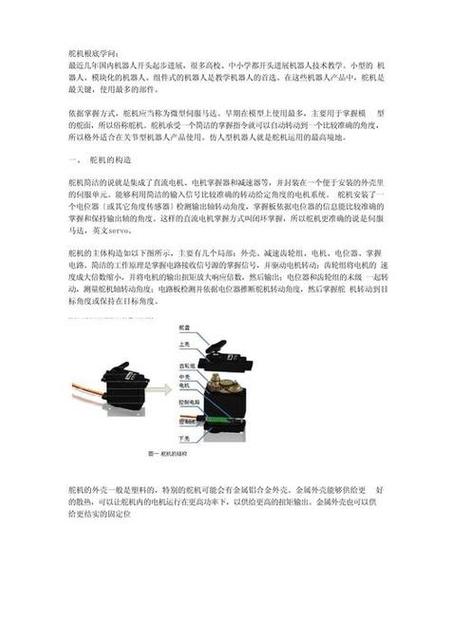
舵机,属于一款具备高精度特性的数字伺服装置,有关其核心设计指标,具体如下:
在常见情况案例里,当处于6.0V电压的状况下,存在一个这样的实例,该舵机启动了一个长度为15cm的机械臂,此机械臂的作用是抓取500g重物,在该过程进行时,经过实际测量得出峰值电流大概是1.2A,而且在持续开展工作5分钟之后,外壳温度大约为45°C,注意这个前提是室温处于25°C,这些情况均属于正常范围。
供电电压:不得超过8.4V
信号电压,其数值不得超过5.5V,此情况下若使用3.3V单片机则能够直接进行连接。
不断持续着的堵转电流,其数值要求为不可以超过3.0A,要是它超过此数值达2秒的话,那么就有很大可能性会致使驱动MOS管被烧毁。
峰值电流 (100ms):5.0A
周期:20ms (50Hz)
高电平所持续的时间,与之相对应的角度关系,其中脉宽处于0.5毫秒至2.5毫秒这个范围,此范围对应着0度至270度。
公式计算:
第一个量,等于,第二个量,减去伟创动力,零点五毫秒,的差,乘以,二百七十度,除以,二点零毫秒,的商。
给出1.5毫秒的脉宽,输出的角度等于,用1.5减去0.5的差,去乘以135,结果是135度。
故障现象1:舵机完全不动作
检查供电:测量红棕线之间电压是否在4.8V~7.4V
查看信号线,动用示波器,或者启用逻辑分析仪,去瞅一瞅橙色线那儿,有没有50Hz的PWM波形。
检查负载:断开舵盘,空载测试是否转动
故障现象2:抖动或无法到达指定位置
电源容量呈现不足的状况,这种情况常常出现在运用USB进行供电的时候,此时需要改换为电池或者稳压源来供电,并且建议提供至少持续2A电流的电源。
地线干扰:确保舵机地线与控制板地线之间电阻小于0.5Ω
脉宽精度欠缺,的没办法直接操控,它需借助Servo库。
故障现象3:异常发热或异响
机械堵转:检查是否超出270°限位或外接机构卡死
齿轮损坏:拆开舵机检查金属齿是否有崩齿
电压过高:测量红色线电压是否超过7.4V
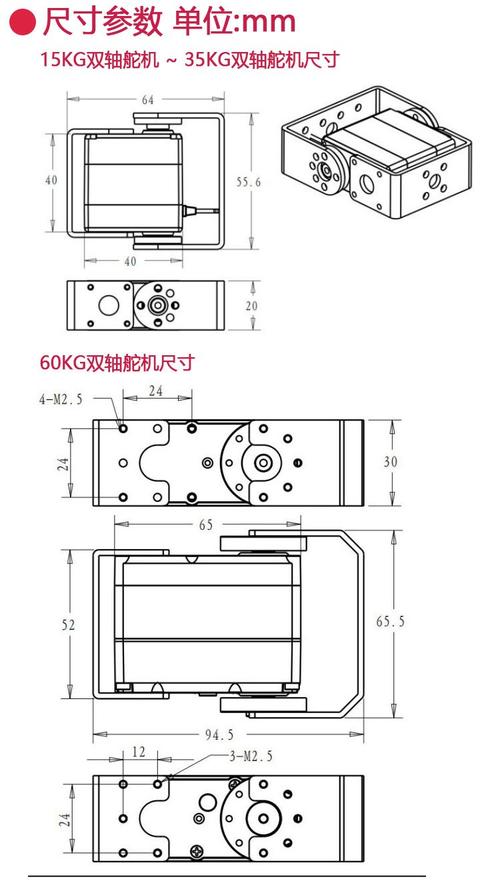
总长度:40.5 (不含输出轴)
总宽度:20.0
总高度:39.5 (含底部凸台)
输出轴高度:11.0 (从安装面算起)
安装孔距:31.5 × 15.0
安装螺纹孔:M2.5 × 4个 (深4mm)
固定螺丝长度不得超过5mm,否则会顶到内部电路板
舵盘安装时对准花键缺口,手动旋转至目标角度后再锁紧螺丝
避免侧向冲击力直接作用在输出轴上 (可能损坏轴承)
以下代码实现舵机从0°到270°往复摆动:
#
Servo ;
int = 9; // 信号线接数字引脚9
void setup() {
.(, 500, 2500); // 脉宽范围500μs~2500μs
}
void loop() {
.write(0); // 0°
delay(1000);
.write(135); // 中间位置
delay(1000);
.write(270); // 270°
delay(1000);
}
重要提示:
把脉宽范围通过使用(,min为min ,max值为max)来进行明确指定,防止因使用默认值(其范围是544至2400)从而致使角度出现偏移。
连续进行写入操作时的频率,给出的建议是不可以超过20Hz,也就是每50ms进行一次,不然的话,舵机内部的处理器有可能会出现过载的情况。
需要首要检查供电项:90%的出现“不转、抖动”情况的问题,产生的根源是电压达不到要求或者电流处于不足状态,要运用2A高于此数值的稳压源,或者是充满了电的2S锂电池(其电压为7.4V)。
角度范围被固定在了0°至270°这个区间,不可以借助软件强行输出超出此范围的情况,不然会导致机械出现损坏。
那种全都是金属材质的齿轮,并不具备防止堵转的功能:要是持续出现堵转的情况达到两秒以上,那就很有可能会导致电路被烧毁,或者齿轮崩齿,所以一定要设置软件进行限位。
信号线绝对禁止接高电压:直接连接12V信号会立刻损坏芯片。
1. 开始首次进行上电操作之前,不要去安装舵盘,处于空载状态下发送90°(脉宽是1.5ms)的信号,核查确认舵机能正常地锁定位置。
2. 负载进行调试之际,要串联电流表,去观察峰值电流是不是超过2.5A,要是超过了,就需要降低加减速度,或者更换大扭矩舵机。
3. 安装之前进行批量操作之际,用量角器去校准每一个舵机的实际位置,也就是0°以及270°的位置,将个体偏差记录下来伟创动力舵机,偏差通常处于±3°的范围之内。
4. 长期持续运行期间,每隔200小时,需进行一次润滑脂(二硫化钼)的加注操作,同时还要检查螺丝有无松动现象。
这本手册涵盖了舵机的所有关键信息,依照上述指南,您能够在30分钟内完成从接线直至编程控制的完整调试,要是碰到本手册未列出的异常情况,检测供电电压以及信号波形,这两项排查能够解决90%的疑难问题。























