



























TECHNICAL SUPPORT

发布时间: 2026-04-05
本文给出了,关于舵机的,关键性能指标与,适用场景以及,安装要点还有,常见故障排除方法,用以帮您迅速判定,该舵机是不是,符合您的项目需求,并且确保安全可靠地使用。
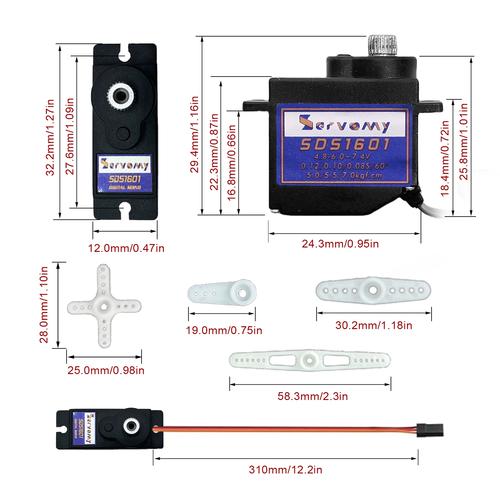
其属于标准尺寸的金属齿轮数字舵机,名为,常见于航模领域,也常见于属于包含 rc 车等的机器人关节、机械臂等领域,型号中的mg通常代表金属齿轮即Metal Gear,相比塑料齿轮具备更高的耐磨损和抗冲击能力,而多为厂商内部编码,指向具体的扭矩等级、转速及控制协议。脉冲宽度调制信号控制这种方式,通常被该舵机来采用,并且其工作电压范围是4.8V至7.4V。
需说明的是,下面这些数据伟创动力,是以同类型标准舵机的行业通用规格作为依据的,而实际的数值呢,你们要以自己手中产品的官方说明书或者实测的结果为准。在进行选型之前呀,一定要去核对产品标签或者厂商所提供的数据表。
检验方式为运用舵机测试仪,或者输出1500μs的信号,以此来确定舵机臂是不是能够精确地回到中间位置;再施加额定的负载,像悬挂砝码这种情况,去测量实际的堵转扭矩是不是符合标准。
以航模舵面控制来说,针对50cc以下配置汽油机亦或是大型电动固定翼的情况,会运用去驱动副翼以及升降舵。存在着常见问题伟创动力舵机,要是在飞行期间出现抖动现象 ,一般而言是由于电压不稳定 ,要不然就是信号线过长 ,也就是超过50cm却没有添加磁环。
针对 15kg 级双足机器人之髋关节,或者机械臂的肘部,所涉及的机器人关节,其时常出现的典型故障乃是扫齿。而造成扫齿这种故障的原因大多是瞬间冲击超出了额定扭矩,鉴于此情况,加装机械限位,或者设置软件软限位。
第十分之一比例的遥控车转向方面,在越野或者竞速型卡车上,那个舵机是直接承受来自于轮胎的撞击力量,不少用户常常反馈说,因为防水性能不足从而致使电路板出现腐蚀的情况,而关于其会在下文的第四部分呈现出来。
1. 供电方面需匹配,舵机峰值电流能够达到2A往上,不要直接去接接收机来获取电力,应该运用UBEC也就是稳压模块,或者利用独立电池供电才行,不然的话有可能致使接收机重启。
2. 舵机臂的安装方式为,要给舵机通电,使得舵机回到中立点,也就是1500μs,然后再以90°角来安装舵机臂。常见的错误情况是,强行在并非中立点的位置进行安装,进而导致行程出现不对称的状况,或者致使内部电位器损坏。
3. 螺丝的长度方面,用于固定舵机的那种螺丝,其长度不应该超出壳体沉孔的深度,而壳体沉孔深度一般是5mm,要是过长了的话,就会把内部电路板顶坏。
4. 防尘防水方面,rds这个的外壳通常是不具备防水方面等级的,要是有在户外使用的需求,那么可以在相关接缝处采用涂抹硅橡胶的做法,对于出线口要使用热缩管来进行密封操作,同时还要在电路板之上喷涂三防漆才行。
5. 于首次作通电测试之时,初时先不进行负载连接操作,接着以手指轻轻挡在舵机臂处,进而确认是否不存在异常卡顿现象或者不存在异常发热情况。要是发热情形严重(温度超过60℃),即刻实施断电举措,而后展开对电压或者信号频率方面的检查(针对数字舵机而言,PWM频率建议处于50 333Hz这个范围)。
重申核心观点,舵机被定位成中等负载、有着金属齿、存在标准尺寸的数字舵机,它适合那种扭矩需求处于15kg·cm左右、速度要求并非极端(大于0.13s/60°)的陆空机器人项目。并且,其可靠性对正确的电压匹配、安装限位以及必要的防水处理有着高度依赖。
行动建议:
1. 型号选择阶段,使用测力计或者悬挂砝码办法实地测试您项目所需要的最为大的扭矩,要是超过16kg·cm,那就直接去选择20kg级以上的舵机。
2. 安装之前进行测试:运用舵机测试仪以及具有可调节功能的电源,于6.0V的电压状况下使其运行30分钟,在此期间没有出现有不正常发热的情况之后,再将其安装到机器上。
3. 进行系统整合,要为每一个舵机,各自配备3A以上的UBEC,并且当信号线距离控制器大于1米的时候,在信号线上串联100Ω电阻,以此来抑制干扰。
4. 在例行的定期维护工作进程当中,当设备每运行达到50小时这个特定时长之后,就需要着手将设备的底盖拆开,从而对其中存在的金属碎屑展开清理工作,并且还得涂抹上新的润滑脂,这种润滑脂是低温型的,比如像昆仑2号那样的。
根据上述步骤去进行操作,您能够充分施展舵机的性能结果,并且能够有效防止90%以上的常见使用故障的出现。要是碰到本文未曾涵盖的异常状况,那么请优先去查阅您所购买产品的官方数据手册。























