



























TECHNICAL SUPPORT

发布时间: 2026-04-22
那核心技能是舵机控制,它存在于机器人项目里,也在航模那个领域中,还于智能小车等这类项目内。不管你是打算去制作一个能够抓取物体的机械臂,又或者是想着给遥控车增添转向功能,唯有掌握舵机控制方法,才可以让你迅速达成精确的角度定位。本文依据标准舵机,也就是由50Hz PWM信号控制的那种技术规范,给出一套从原理一直到代码的完整操作指南,保证你依照步骤去操作便能够成功地控制舵机。
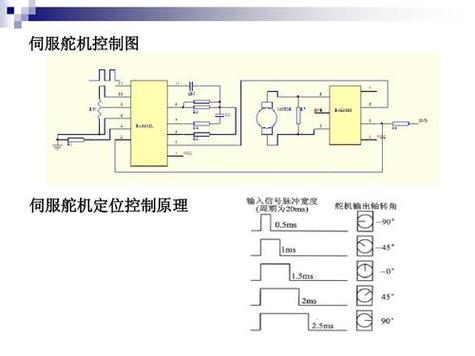
舵机转动角度,由PWM信号的高电平时间也就是占空比,唯一决定,标准舵机一般采用50Hz的PWM信号,其周期为20ms,其中。
高电平0.5ms → 舵机转到 0度
高电平1.5ms → 舵机转到 90度(中位)
高电平2.5ms → 舵机转到 180度
特别关键的结论是,你并非一定要去领会复杂的PID,仅仅只需使得控制板,像、STM32、树莓派这类,输出契合上述时间参数的PWM波形,便能够精确地控制舵机角度。而这个结论,乃是适用于市面上高达99%的模拟舵机以及数字舵机的。
舵机通常引出三根线,颜色和功能固定如下:
> 重要注意事项:
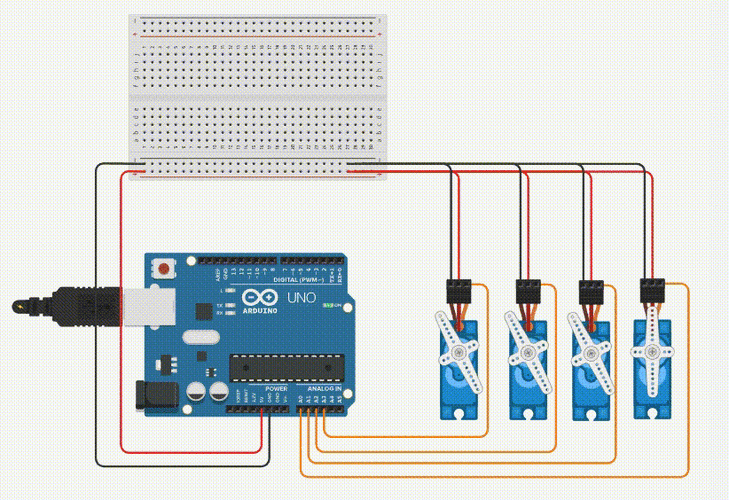
电源得是共同接地的状态伟创动力,控制板的GND和舵机电源的GND要连接到一块儿,不然信号就没办法被识别出来。
,电流要求方面,单个标准舵机工作的时候,电流大约是200 500mA,而启动瞬间能够达到1A。,不要直接从单片机开发板的5V引脚去取电,因为这样做容易烧毁板子。,应该使用外部5V/2A以上的稳压电源,并且要把电源GND与开发板GND进行连接。
常见错误案例呈现为,众多初学者径直将舵机的红色线连接到的5V引脚,进而致使舵机出现抖动状况或者开发板发生重启现象。正确的做法是,进行连接时红色线要连接到外部电源的正极,而开发板仅仅只为其提供信号。
下述代码采用Servo.h库,属于最为稳定的控制方式。要是你运用其他控制板(像STM32、ESP32),其间原理全然相同,仅需对PWM输出参数作出调整。
#
Servo ; // 创建舵机对象
int = 9; // 信号线接数字引脚9
void setup() {
.(); // 绑定引脚,默认角度范围0180°
}
void loop() {
.write(0); // 转到0度
delay(1000); // 保持1秒
.write(90); // 转到90度
delay(1000);
.write(180); // 转到180度
delay(1000);
}
要是不借助库,直接去生成PWM信号,这适用于那种有着精确控制高电平时间需求的场景。
int = 9;
int angle = 90; // 目标角度
void setup() {
(, );
// 使用定时器或生成信号,周期20ms
}
void (int angle) {
// 将角度0180映射到高电平时间0.5ms2.5ms
int = map(angle, 0, 180, 500, 2500); // 单位微秒
(, HIGH);
();
(, LOW);
delay(20 /1000); // 剩余时间补足20ms周期
}
1. 马上着手:预备一个符合标准的SG90或者MG995舵机,准备一块 Uno,筹备一个5V/2A电源适配器。依照第二节的方式进行接线,拷贝第三节的代码,在10分钟之内对角度控制展开验证。
2. 通过测量来进行验证,要是你拥有示波器或者逻辑分析仪,去测量信号线的高电平时间,观察其是否精确地对应角度,这可是最为可靠的调试办法。
3. 成功达成任务之后,着手去尝试同时操控多个舵机,此实现借助Servo库当中,至多支撑有12路的情况,或者经由串口来发送角度指令,以此达成人机交互的目的。
4. 记住那个核心公式,角度等于,高电平时间减去零点五毫秒,再乘以一百八十度,然后除以两毫秒。不管你更换了什么样的控制板,只要能够生成符合这个公式的PWM波形,就能够控制任何标准的舵机。
重复核心观点:舵机控制实际上就是生成周期为20ms、高电平时间在0.5ms至2.5ms之间的PWM信号。要做到电源充足以及共地,接着去检查信号波形,如此一来99%的问题都能够得到解决。依照本文所罗列的步骤以及代码,你将会在30分钟之内达成从无到精确控制舵机角度。























