



























TECHNICAL SUPPORT

发布时间: 2026-05-01
众多初学者,于进行机器人项目时,会碰到一个问题,于开展机械臂项目时,也会碰到一个问题,于开展航模项目时,同样会碰到一个问题:究竟是否需要“舵机控制板”?
如果你仅需操控1至2个舵机,那么直接运用板上的PWM引脚就行,这是核心答案中的一种情况。然而要是要操控3个以上舵机,或者对舵机动作有着高精度要求以及同步运行的需求时,那就得使用舵机控制板,比如基于芯片的模块,这是核心答案中的另一种情况。
跟你一步步讲如何判断,如何选择,如何正确使用舵机控制板,是从实际案例着手的。
有一位从事创新实践的人,借助 Mega去直接施行对12个舵机的控制,以此完成六足机器人的组装,这些舵机单独进行测试操作皆是正常的,然而当组合起来运行的时候,却出现了抖动的状况,还存在卡顿现象,并且偶尔会出现不动的情形,经过仔细检查后发现了如此情况:自身的定时器资源被大量地占用了,而且舵机在同时启动的瞬间电流过大,进而致使主板的电压变得不稳定。
的最终结果是:添加一块用于控制16路舵机的控制板,并且连接外部独立的电源。该机器人不但动作呈现出平滑的状态,而且能够以轻松容易的方式达成复杂的行走姿态。
这一案例表明, 直接去操控多个舵机,其存在着先天的局限性。
满足以下任意一条,就建议使用舵机控制板:
舵机控制板的实质是一个单独的PWM生成器,最常被使用的芯片是,它借助I2C总线来接收到自发出的指令呀,而后输出多达16路各自独立且具备高精度的PWM信号呢。
关键特性:
每一路的频率,能够单独去进行设置,其范围是从40Hz到,以此来适应不同的舵机。
分辨率为12位,范围是0到4095 ,角度控制精度0.09度 ,针对180度舵机。
可级联:用同一个I2C地址最多62块板,控制992个舵机。
内置晶振,信号稳定,不受复位影响。
在市面上,占据百分之九十九比例的舵机控制板,皆是基于的,于选购之际,要认准以下这些规格:
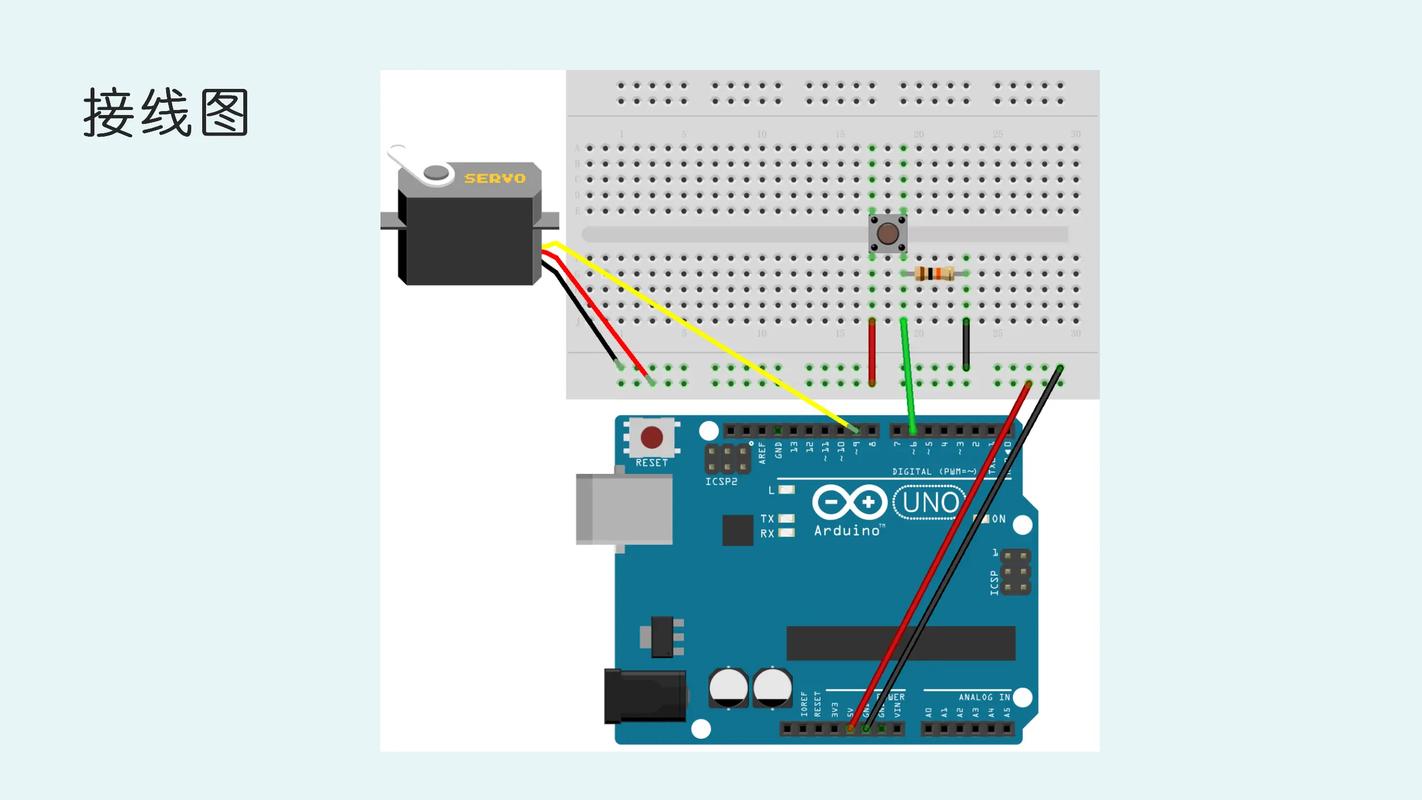
1. 连接与舵机控制板
控制板VCC → 5V
控制板GND → GND
操控板SCL,要连接到 A5 ,这里的型号可以是Uno或者Nano ,又或者是21 ,而21对应的是Mega ,是这样连接的。
将控制板的SDA,连接至的A4,该若为Uno或Nano型号,连接方式如此,若为Mega型号,则连接至20。
⚠️留意:甭经由的5V引脚去给舵机供应电力!
2. 外接舵机电源
把舵机电源的正极接上,这个正极一般是红线,将其连接到外接电源的正极那里伟创动力舵机,外接电源比如是4.8到6V的电池或者稳压模块。
舵机的负极,也就是那根棕/黑色的线,要同时连接到外接电源的负极,以及控制板的GND,也就是实现共地。
舵机信号线接到控制板的PWM输出口(如CH0~CH15)
3. 验证电源容量
约0.5至1A是每个舵机的堵转电流,4个舵机的话,至少得有2A以上的外接电源。
安装库,于集成开发环境里进行搜索,进而安装叫做“脉冲宽度调制伺服驱动器库”的内容伟创动力,此乃开源库,并非商业品牌的推荐。
#
#
// 地址默认为0x40,可通过跳线修改
ver pwm = ver(0x40);
// 舵机频率 50Hz (周期20ms)
# 50
// 舵机脉宽范围:0.5ms~2.5ms (对应0~180度)
# 500
# 2500
void setup() {
pwm.begin();
pwm.cy(); // 校准内部晶振
pwm.();
delay(10);
}
// 角度转脉宽
int (int angle) {
float pulse = + (angle * ( ) / 180.0);
map(pulse, 0, 20000, 0, 4095);
}
void loop() {
// 控制第0号舵机转到0度
pwm.(0, 0, (0));
delay(500);
// 控制第0号舵机转到90度
pwm.(0, 0, (90));
delay(500);
// 控制第0号舵机转到180度
pwm.(0, 0, (180));
delay(500);
}
Q1:舵机接上控制板后毫无反应?
查看I2C地址,运行那个被称作“I2C扫描程序”的程序,以此来确定设备地址是不是0x40。
确认舵机电源已接通且电压正常(用万用表测)。
Q2:舵机剧烈抖动或乱转?

在绝大多数情况之下,其呈现出来的状态是未共地,然而,对于控制板GND而言,它是一定要与舵机外接电源的负极相连接的。
也可能是电源电流不足:逐个断开舵机测试。
Q3:如何控制大于180°或连续旋转舵机?
连续舵机, 将脉宽设置为, 处于700至2300微秒之外的值, 像是暂停值1500微秒。
专门用于多圈控制功能的舵机,采用舵机控制库里头的这种方式直接去写占空比,而不再借助这种方式。
Q4:控制板可以同时控制数字舵机和模拟舵机吗?
没问题,只要将频率设定为50Hz,这是模拟舵机所要求的频率,并且数字舵机也能够兼容50Hz。
再次强调:
舵机少于3个 → 用直连,省事。
舵机数量大于或等于4个,或者存在需要高精度同步的情况,此时应马上购买基于的16路舵机控制板,其价格仅十几元,然而却能够解决80%以上的舵机控制难题。
行动清单:
1. 盘点你的项目一共需要多少舵机。
2. 若数量大于或等于四个,前往电子市场购置一块模块,要问清楚是不是带有排针以及电源端子。
3. 需要准备一个独立电源,比如4节AA电池盒或者稳压模块,电流要至少为舵机数量乘以0.5A。
4. 参照本文第五部分所呈现的接线图来进行连接,接着上传第六部分所需的代码以对单舵机开展测试。
5. 成功驱动后,再逐步增加舵机数量。
如若掌握了舵机控制板的运用方式,那么便能从容应对自机械手直至人形机器人的各类项目。自今天开始,告别舵机颤动现象,达成精确控制。























