



























TECHNICAL SUPPORT

发布时间: 2026-05-08
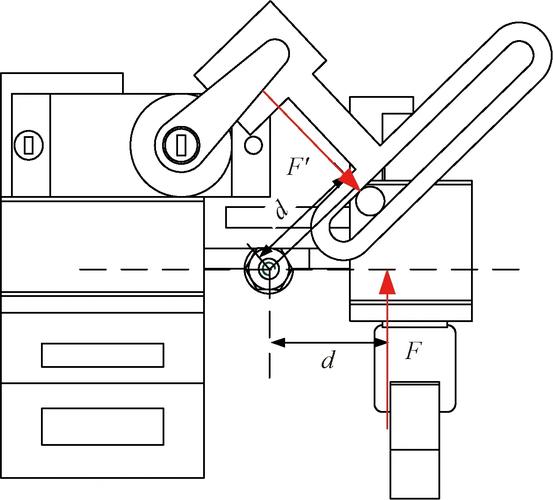
舵机连杆同摇臂的连接,构成制作里、机器人关节装配内极为基础且相当关键的操作,连接倘若不稳固或者方法出现错误,就会致使舵机没办法精准传递运动,甚至会损坏舵机,此文本在常见标准舵机诸如尺寸为40×20×36mm的通用型舵机以及常用连杆类型的基础上,给出能够直接去执行的标准连接步骤。
把连杆末端同摇臂之上的固定孔稳固地结合起来这种行为的本质才是连接,要确保不存在相对的滑动情况。最为通用且最为可靠的方式是运用顶丝也就是紧定螺丝来进行固定。具体的操作情形是像下面这样:
1. 调整位置:把那个连杆末尾处的金属球头或者圆孔,对准摇臂之上恰当的安装孔。一开始先用手部轻轻地推进去,而后确认一下孔位是不是匹配。
2. 对锁紧顶丝进行操作时,要选用与之对应的规格的内六角扳手,一般这个内六角扳手的规格是1.5mm或者2mm ,然后按照顺时针的方向,去拧动摇臂侧面的顶丝,一直拧到能感觉到有明显的阻力出现 ,顶丝会从侧面使其以压紧连杆末端的方式,达成固定的目的。
3. 对这牢固程度予以验证:借助手以较为适中的力度去轻轻拉动那连杆 ,对是否存在松动以及明显晃动的情况加以确认。要是出现了松动这种状况 ,那就接着去将顶丝拧紧。
所需要用到的工具包括,内六角扳手,其规格分别为1.5mm、2mm以及2.5mm,还有十字螺丝刀呢,部分摇臂是要用到它来拧十字螺丝的,另外还有尖嘴钳,用于起到辅助固定的作用。
检查舵机摇臂的类型,常见的有圆形的,还有十字形的,以及六角形花键形状的。要确认摇臂能够完全套入舵机输出轴,并且不存在裂纹。
检验连杆类别,常见包括球头连杆,其末端带有球头,还有Z型连杆,其末端弯折成Z形,以及直连杆,带有孔。此文中以应用最为广泛的球头连杆作为示例。
将摇臂置于舵机上并通电(或手动旋转),使舵机回到中位。

连杆身为传力部件伟创动力,它的固定孔得跟摇臂中心轴维持垂直的关系,挑选摇臂上距离中心最近的孔位能够获取最大的力,距离最远的孔位能得到最大的行程,常用的选择是:距离中心第2或是第3个孔。
根据摇臂和连杆的具体形式,分为三种常见情况:
最常见案例(舵机标准配置):
由塑料或者金属制成的摇臂,在其侧面预先制作有顶丝孔,连杆的末端是光轴。它直接插入之后,使用1.5mm的内六角扳手把顶丝拧紧就行,并不需要额外的螺母。
完成连接之后,使得用手来来回回去拨动摇臂,以此去感受间隙。要是存在大于1mm晃动的情况,那就表明顶丝没有锁死,或者孔位并不匹配。
解决办法是,将其拆卸下来后,在顶丝的螺纹部位涂抹少许某种特定的螺纹胶,比如像 243这种螺纹胶,之后再重新进行锁紧操作。
将舵机接入控制器,发送最小、中位、最大三个角度指令。
瞧一瞧连杆是不是跟随着动作做到精准精确,摇臂和连杆相互连接的地方未出现打滑现象,也没有异常声响发出。要是存在这种情况,那就再次进行第三步。
问题1:顶丝拧紧后仍松动
原因:顶丝规格不符(过长或过短)或螺纹滑丝。
对其进行处理:用符合标准长度规格的顶丝予以替换(常见的规格为M2×3mm或者M2.5×4mm)。要是出现滑丝的状况,那就把摇臂更换掉。
问题2:连杆与摇臂连接处卡死
原因:固定螺丝过紧,导致连杆无法绕轴转动。
解决:将螺母回退1/4圈,直到连杆能自由摆动但无轴向窜动。
问题3:舵机转动时连杆脱落
原因:顶丝未加螺纹胶,振动导致退出。
解决:清洁螺纹油脂,涂抹低强度螺纹胶后重新锁紧。
核心观点重申:舵机连杆与摇臂的连接,本质是“顶丝压紧或螺母锁固”的机械锁定。无论何种连杆,确保连接件无相对位移,且连杆能绕固定点灵活转动。
行动建议(立即执行):
1. 阶段一:将舵机电源予以断开,借助内六角扳手对现存连接展开检查。要是顶丝能够较为轻松地被拧动伟创动力舵机,那么便有出现脱落的风险存在。
2. 接着的第二步是,针对所有承受动载作用的连接点,于顶丝螺纹的部位进行涂抹,涂抹时施加1滴螺纹胶,该螺纹胶选择蓝色且中等强度便可达成指定要求。
3. 第三步:每周执行一次快速检查——用手拉动连杆,确认无松动。
能让舵机寿命得以延长50%以上的正确连接,可将因虚位致使的控制精度误差给消除掉。请严格依照上述步骤去进行操作。























