



























TECHNICAL SUPPORT

发布时间: 2026-05-08
学习机器人这种事物,还有航模伟创动力舵机,或者自动化设备时,好多人弄不清“普通电机”跟“舵机”究竟有啥不一样的地方。简而言之,电机承担“持续转动”职能,舵机承担“转动到确定角度后停下”的职责。这篇文章会借助清晰的对比表格,还有典型图片特征说明以及推荐视频资源,帮你一下子完全弄明白两者的关键区别。
一个直观的案例:
在家庭中被称作电风扇摇头装置使用中的电机,经过连接电源之后呈现出持续不断转动的状态,借助连杆所构成的机构达成了来回反复摆动的情形,而这般起到以上所述作用的便是电机。
有一个属于遥控机器人的手臂关节,它是这样的,当你用手去拨动摇杆的时候,那个手臂能够精准地停留在三十度、九十度或者一百五十度所对应的位置且保持并不移动,而这个部件就是被称作舵机的东西。
一般的电机,是依据电磁感应原理,转子于磁场里持续地进行旋转,只要给予供电,便会始终不停地转动下去,并且不存在位置感知这类能力。
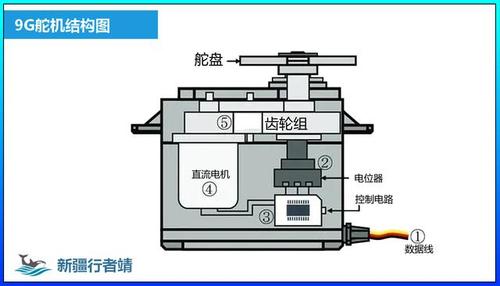
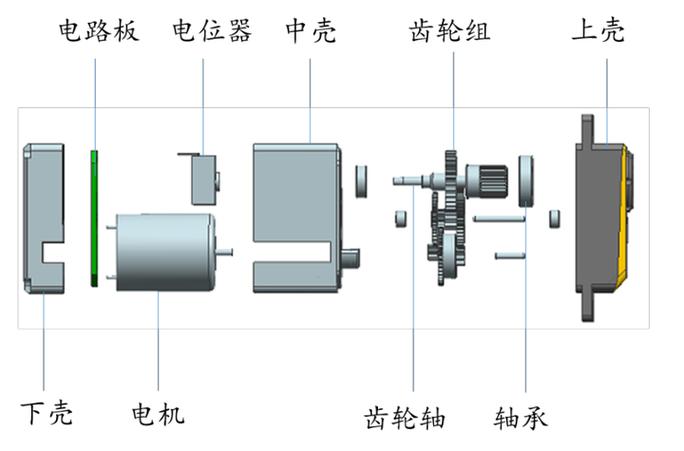
用于控制舵面转动角度的舵机,其内部整合了直流电机,以及起到降低转速增大扭矩作用的减速齿轮,还有用于处理信号数据的控制芯片,以及能够检测舵机当前位置角度信息从而为控制芯片提供反馈的角度传感器。当控制芯片接收到PWM信号之后,会将由传感器提供当前角度,与预先设定的目标角度进行对比,进而依据对比结果自动驱动电机作正向转动或者反向转动,直至舵机的转动到达目标位置并将其锁定。
有这样一种装置,它被称作电机,一般来讲,仅仅只需要两个能够区分正负极的引脚即可,在其运行过程中,所施加的电压数值越高,它转动的速度就会越快,而且,要是将正负极进行交换,那么它就可以实现反转。
舵机,它存在着三根线,一根是电源的红色线,一根是地线的棕色或者黑色线,还有一根是信号线的橙色或者黄色或者白色线。信号线所接收的是周期为20ms也就是50Hz的PWM脉冲。
脉冲宽度0.5ms → 0°
脉冲宽度1.5ms → 90°(中位)
脉冲宽度2.5ms → 180°
(不同品牌可能有细微差异,但基本原理一致)
普通电机:无角度限制,可无限连续旋转。
以标准舵机而言,其机械限位常常是处于0至180°这个范围,有一部分是支持270°亦或者是连续旋转的情况,这里所说的连续旋转舵机实际上已然转变成了那种能够调节速度、能够实行正反转的电机,不过它依旧保留着闭环反馈。
当你看到实物图或原理图时,可以通过以下特征快速判断:
看那引线,普通的也就是平常所说的直流小电机,一般情况下仅仅只有两根电源线,一根是红色的,另一根是黑色的。而舵机呢,绝大多数是有着三根线的,一根是红色的,一根是黑色的,还有一根是白色或者黄色或者橙色的,并且其线束末端带着标准插头,像是JR型或者型这样的。
就外形而言,普通电机大多呈现为圆柱形,其轴伸出的端部不存在额外的外壳。舵机一般是那种方方正正的,由塑料或者金属制成的壳体,常见尺寸大概是40×20×40mm,它的顶部有一个圆形的输出盘即摇臂或者舵盘,并且带有螺丝孔或者花键。
察看内部拆解的图示:去搜索“舵机内部的结构图示”,你将会看见繁杂的电路板(带有芯片)以及一个小型的电位器(带有齿轮的圆形部件);然而电机拆解之后唯独只有线圈、换向器以及磁铁,不存在电路板。
提出自行查找图片进行对比的建议,在图片搜索或者视频平台当中,输入关键词“舵机 vs 电机 内部结构对比”,或者输入“servo motor vs DC motor image”,这样的话就能够获取到大量清晰的具有解剖性质的对比图片。
要切实领会两者的动态差别,视频乃是最为适宜的途径。建议依照以下次序进行观看(文末附有搜索关键词):
1. 原理动画视频
查找“舵机工作原理动画”,或者查找“How servo motor works 3D ”。
重点看:PWM信号如何控制角度 + 内部电位器反馈过程。
2. 对比实测视频
搜索“电机 vs 舵机 控制对比实验”
给电机通电,电机就能达成转动的状态,随后一旦断开电源,电机便会立刻停止转动;给舵机发送一个PWM信号,舵机便会自行运行到指定的角度位置,并且持续保持在该角度,即便用手去掰它,也掰不动,即处于锁定状态。
3. 项目应用视频
搜索“机器人关节舵机控制”和“直流电机驱动风扇”
留意仔细观察,机器人手臂的每一个关节皆是一辆舵机,能够停留在任何一个角度;然而车轮电机必定要持续不断地转动。
4. 单片机教学视频
查寻“ 控制舵机”,对比“ 控制直流电机”。
能直观地看到代码方面的差异,其中,舵机直接运用Servo库去书写角度,像.write(90)这样,而电机则需要借助PWM来控制转速,例如(pin, speed)。
Q1:为什么有些舵机也能连续旋转?
那是称作“连续旋转舵机”的东西,从根本上来说它失去了定位的功能,进而转变成为了能够进行调速、实现正反转的电机;然而它存在着这样一个好处,也就是它不需求额外的驱动电路(那种被称作H桥的电路),仅仅凭借PWM就能对转速加以控制。
Q2:我做的项目中到底该用电机还是舵机?
A:两步判断法:
要是存在“持续转动”这种需求(针对滚轮、螺旋桨、风叶而言),那么请挑选普通电机。
假定存在这样一种需求,即要做到精确对准某一角度维持不变,此需求涉及机械臂关节、摄像头云台、航模方向舵这些方面,那么在这种情况下,就要选择舵机。
Q3:舵机可以替换电机来驱动车轮吗?
A:不行。标准舵机的有效范围是0至180°,没办法持续转动来驱动车轮。连续旋转舵机的扭矩和转速,一般比不上相同尺寸的减速电机,而且成本还要更高。
核心观点再强调一遍:
电机,属于那种仅仅只管转动的开环执行器,舵机呢,则是那种清楚自身所处位置并且能够主动转向目标角度的闭环伺服系统,这二者之间的本质区别在于是否存在角度反馈以及闭环控制。
给你的行动建议:
1. 立马着手实践:要是手上拿着或者树莓派,耗费10分钟各自连接上一个5V电机以及一个9g舵机,去运行示例代码,你将会亲眼目睹“持续转动不停”与“转动到90度便停下”的极大差别。
2. 在视觉学习路径方面,依据第四节所给出的关键词,于B站予以搜索“电机舵机对比图”。同时,在里进行搜索“舵机内部拆解视频”。并且,在百度图片当中查找“PWM控制舵机演示”,从而全面建成直观印象。
3. 项目选型有着这样的口诀,倘若其需求为持续不断地转动伟创动力,那么就去选择电机,要是其需求是确定角度,那就选择舵机,若既有着转动的需求同时还需要进行定位,那就选用伺服电机(也就是更高端的闭环系统)。
知晓了上述内容,你不但明白了电机跟舵机的关键差异,而且能够独自借助图片以及视频资料作进一步深入研习。只要记住功能目标还有选型逻辑,便不会再将两者弄混。























