



























TECHNICAL SUPPORT

发布时间: 2026-05-05
在你面对一台舵机的情形下,当你想要晓得它是以怎样的方式接收信号的,又是怎样驱动电机的,最终怎样精确转到指定角度时,最为直接的一种方式便是看懂它的“驱动结构图”。这篇文章直接对数以百计的舵机内部数得清的三大核心模块进行拆解,这三大核心模块包括控制电路、驱动电路以及执行机构,并且给出典型的接线关系以及信号流向,以此来帮助你能够快速掌握舵机驱动结构的完整知识。
一张符合标准的舵机驱动结构示意图,必然涵盖以下三个不能相互分离的组成部分,缺少其中任何一个都不行:
1. 控制电路(信号解析与决策中心)
作用是,接纳来自外部的控制器,像是单片机、遥控接收机这类发出的控制信号,将里头目标角度析解出来,进而产生与之相对应的驱动指令。
关键元件:微控制器(MCU)、电位器(位置反馈)、比较器。
结构图里的表示,一般是处在信号输入端口的后面,它将电位器与驱动电路输入端相互连接起来。
2. 驱动电路(功率放大与电机控制)
作用:按照由控制电路所发出的呈现为低电流状况的指令,输出能够充分驱动电机实现旋转的具备大电流特性的电流,并且对电机的正向转动、反向转动以及停止运行进行控制。
具有关键作用的元件有,H桥电路,它一般是由4个三极管或者构成的,还有电机驱动芯片。
具有这样一种表示,它处于控制电路跟直流电机的中间位置,其上标注着电源输入,还有接地,以及电机输出端子。
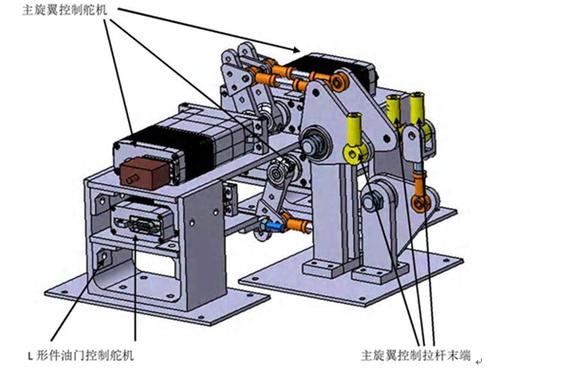
3. 执行机构(角度输出与减速增扭)
功能是,把直流电机的那种快速的旋转,借助齿轮组来实现减速,并且放大扭矩,最终使得带动输出轴转动到指给定的角度。
关键元件:直流电机、减速齿轮组、输出轴。
在结构图里有着这样的表示,其连接驱动电路的输出端,齿轮组借助简化的嵌套圆来示意,输出轴是最终的末端哦。
拿最为常见的那种3线舵机当作例子,这3线分别是电源线 ,、地线 ,、还有信号线 ,、它的完整驱动流程是下面这样的:
信号流向(按顺序):
闭环控制关键路径:
输出轴开始转动,进而带动内部电位器跟着旋转,使得电位器分压值产生变化,控制电路读取该变化值并与目标值进行比较,然后据此调整驱动电路输出进而决定电机是停止还是继续修正。
接线图的三个固定接点(无品牌通用标准):
红线,它是连接电源的导线,这根导线所连接的方向是电源的正极,其电压范围通常处于4.8V至7.2V之间,不过具体的电压数值要依据舵机的规格来确定,这是有相应规定的。
棕/黑线:电源地线(GND)
橙色的线,黄色的线,白色的线,它们是控制信号线,此线接收PWM信号,信号的周期一般是20ms,脉宽处于0.5ms至2.5ms之间时对应着角度。
常见情形是伟创动力,好多头一回用舵机的人发觉舵机不转动或者出现抖动,百分之九十的缘由乃是电源线接反了,要不就是供电电流达不到要求(单个标准舵机工作的时候需要一安到两安的峰值电流)。
若你手中持有舵机驱动的图示结构,当面临以下这些常见的问题之际,是能够直接定位至相应模块的!
虽然核心结构一致,但根据负载需求,驱动结构图会有明显变化:
标准舵机,应用于航模、机器人关节之处,其采用集成驱动芯片,诸如、L293D,或者分立H桥,在图里,驱动电路部分一般而言是一个模块框。
用于机器人腿足、工业夹具的大扭矩舵机,其驱动电路里会添加大电容滤波组,且会在结构图上面进行单独标注,借此防止电机启动瞬间出现电压被拉低的情况。
继续不断旋转的舵机,其驱动结构图里的控制电路,把电位器比较反馈给去掉,改成了开环速度控制,在结构图上面将会清晰明确地作出“无位置反馈”的标示。
核心观点:任何舵机的有关驱动的结构图,从本质上来说,全部都是“控制这样的电路加上驱动那样的电路再加上执行的机构”这种形式的组合,然而信号的流动方向是“PWM输入之后接入从而进行控制解析,接着是H桥驱动,然后使得电机发生转动,伴随齿轮进行减速,之后才是角度输出,接入电位器形成闭环”。
行动建议(帮助你真正掌握):
1. 尝试着利用纸张,依照上面所述的三大模块,动手绘制一遍信号的行进方向图,同时标明出每一个环节的具有代表性的电压或者 电流的范围数值。
2. 依据实物来查看,将一个报废舵机予以拆开伟创动力舵机,此过程要留意切勿进行带电操作,之后借助万用表寻觅到电源、信号、电机以及电位器的焊点,使其与结构图逐一进行对应。
3. 进行测试验证,通过信号发生器输出标准PWM信号,于不同脉宽情形下测量驱动电路输出端的电压变化,以此来验证“脉宽 → 电机转动时间 → 输出轴角度”这样一种逻辑。
在你要牢牢记住是,使得舵机驱动结构图得以看懂,这实际上便是要寻得处于这样的一整条完整链条,即信号是从哪里进入的、电流又究竟是怎样进行放大的、电机又是以何种方式转动的、角度又是怎样予以反馈的。在后续之下一次当遭遇到任何舵机方面的问题时,是要借助结构图来对故障模块进行定位,接着才着手开展测量工作,如此一来便能够被极其快速地解决掉。























