



























TECHNICAL SUPPORT

发布时间: 2026-05-12
舵机力矩控制为核心控制技术,此技术借助调整输出驱动力矩的大小与条件,成就舵机得以适配不同负重负载任务,于机器人、智能家居装置、航模等项目里,它是确保运行稳定性的关键要点所在。
1. 常规参数匹配基准是,依照公开的舵机通用参数分级规范,市面上主流舵机的力矩区间被分成5个档位,这5个档位对应不同适配场景 ,0到2kg·cm适配微型迷你舵机,此舵机一般会应用在指尖云台、小型航模舵面控制场景 ;2到5kg·cm适配桌面小型伴护机器人的关节输出场景,在6V供电情况下典型机型能够达到4kg·cm以上输出力矩 ;5到15kg·cm是多数数码标准舵机的常用区间,这个区间能满足普通机械臂关节、小型展示类自动化设备的需求 ;15到40kg·cm及以上归属于大扭矩专用舵机,这类舵机适用于工业轻量自动化、大型仿生机器人驱动等重载任务。该分级标准的信息,是从高校机电工程学院教学实验公开的参考资料中来的,所有档位的参数,都和量产通用舵机的官方标称基准值相对应。
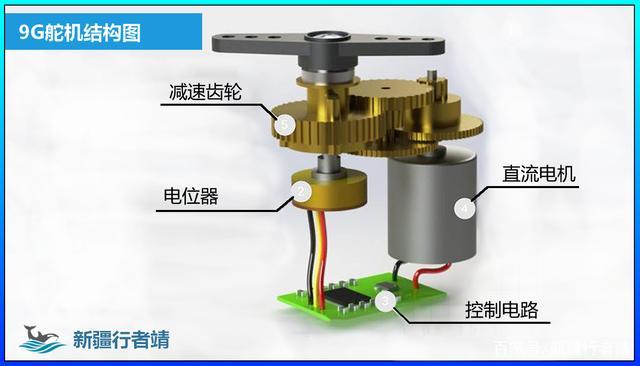
2. 力矩控制有着底层逻辑支撑,常规舵机内部由三部分构成,分别是控制电路、驱动电路、执行机构,力矩控制并非依靠轻松的位置信号调整,其核心在于通过实时监测电机的回路电流数值,匹配减速齿轮组的传动效率换算出实际输出力矩,堵转阶段电流数值最高对应最大堵转力矩,在正常运行过程中会依据预设阈值动态调整驱动输出强度,以此避免过载烧坏电机。
1. 闭环电流采样控制法,它属于应用极为广泛的标准控制方案,其步骤如下,,是在舵机的电机驱动回路之内串联毫欧级高精度采样电阻,,借助控制单元的 AD 转换器依序实时采集电阻之上的电压数值,依据欧姆定律换算得出当前电机实际工作电流值,,对照预先标定好的“电流 力矩”映射对照表,当处于超过预设力矩上限的情况时,自动降低输出驱动能力或者直接触发停止保护。在桌面小型陪伴机器人已量产的方案当中,这套方案有着广泛的实践,在实际运行时下能够精准地管控每一个关节的输出力矩数值,以此来避免出现夹板件夹碎物品的情况,以及机器人关节扭矩过载卡停的问题。与之对应的实际验证方案来源于自动化控制公开课程的实验环节伟创动力舵机,其控制偏差能够被控制在5%以内。
2. 舵机位置环限力矩调整方案如下:对于那种不带有外接传感器的、标准普通的PWM接口舵机而言,其开发者能够直接去调整控制程序当中的位置响应占比参数,而无需对硬件进行改动。比如说,工程人员常常会运用这样的方法,初始的时候,预先设定舵机响应目标位置的PWM 信号增量阶梯是10u秒,当检测到舵机达到了预设的临界电流值之后,便直接去缩小信号的步进增量,通过这种方式来间接限制输出力矩提升的速率,这类方法,尽管控制精度相较于闭环采样方案稍微低一些,然而却完全能够适配普通开源单片机的快速开发需求,在校机器人比赛的参赛项目当中,几乎全部都采用此方法来处理负载冲突问题。
3. 动力传动物理调整法,在不想改动控制程序以及电路的场景当中,能够直接更换参数匹配的齿轮组配件,将原有输出级的减速比降低到之前的70%左右,如此便能有效降低最大堵转力矩数值,在换成强度更低的软胶咬合传动齿轮时,若力矩超出设计阈值,会直接通过打滑的方式释放过载冲击力,完全不会烧毁控制主板电路,这种操作属于航模玩家社区公开交流通用实操方案,不存在软硬件修改的学习门槛,上手速度极其快。
4. 所有用RS485、CAN总线通信接口的智能舵机产品,原厂出厂时已内置力矩控制寄存器,总线舵机自带原生力矩控制功能,只需在串行控制指令里调用对应寄存器地址位填预设力矩百分比参数,其可调整范围是最大堵转力矩的10%到100%,设备上电运行后就能自动执行全闭环的力矩输出管理。此等由总线控制的标准指令规范同样是源于公开的工业机器人驱动模块的技术文档,在实际进行操作之际不存在额外的调试环节,配置流程仅仅只需两步就能够达成设置目标。
第一种常见错误是,不控制力矩去做全堵转测试,市面上不少开发新手,在项目调试阶段,直接锁住舵机输出轴,给予满驱动信号,仅仅短短3秒,连续高负载堵转运行后,舵机内部的电机绕组,轻则产生过热虚焊问题,重则会出现永久性烧毁损坏。正确做法是,不管采用哪一种控制方式,要提前在程序代码里,添加上超过极限力矩保留阈值就自动降功率停止输出的相关逻辑内容。
第二种常见的严重错误,是不加区分地直接套用力矩数值参数。在不同驱动供电电压输出环境下,标定同一位号的舵机实际堵转力矩数值对应关系,是完全不同的。比如,在6V供电环境下标称4kg·cm力矩的普通舵机,当供电提升到7.4V 时,最大堵转输出力矩会升高接近30%。要是用原定的旧阈值数值设定,后续一定会出现超出限位加载的异常问题。
在齿轮组传动状态方面,存在第三种情形即为忽略其带来的力矩流失影响,这一影响具体表现为,传动润滑效果逐渐降低,在连续经历上千次的启停循环使用后,齿轮咬合会出现磨损状况,最终从中换算得出的等效实际输出力矩数值,通常要比标称参数低,低的幅度至多在15%至20%左右,处于这种情况时,定期开展力矩参数重新标定适配操作,绝对不能直接全周期沿用初始参考数据。
在舵机力矩控制里,核心要紧基础就得先把对应力矩档位型号的设备,按照实际应用场景负载大小选好,接着从符合项目开发对应的能力层面,挑选硬件采样适配或者纯软件参数调整等技术路径,去构建适配的动态力矩管控逻辑,整个操作流程,一定得设过载时的主动保护机制,拒绝满负载长期堵转运行这种特容易损毁器件的危险操作,保障设备运行周期全程稳定性,不出现意外中断的情况。
用户技术基础不同、进度各异,可依自身实际状态选用相应适配行动方案:其一,针对零基础入门的新手用户 ,可先从手中常规PWM舵机程序调试着手 ,优先通过实操 ,借由调整位置信号步进间隔速率 ,间接管控力矩方案来开展测试 ,将整个操作学习耗时控制于两小时以内 ,得以快速完成初步的控制效果可行性验证 ;其二,对于普通项目开发实践用户 ,优先尝试闭环回路与高精度电流采样控制方案 ,同时配合现场力矩逐台校准操作伟创动力,以确信力矩最终的实际输送精度符合项目要求 ;项目在全场景实际应用状态下 ,要求于稳定高载环境中工作 ,则直接选型自带成套力矩管控寄存器的总线通信版本配套舵机 ,依据相关公共公开技术说明填写指令参数 ,即可搞定所有配置流程 ,不存在复杂的额外后续开发工作 ,便可直接交付投入正式应用。























