



























TECHNICAL SUPPORT

发布时间: 2026-05-20
亲自动手去做一款简易的舵机,听闻起来好似在挑战那被认定为“不可能完成的任务”,对不?事实上,它并非如你心里所想象的那般困难哟。好多人在头一回碰到航模、涉足机器人领域亦或进行小制作之际,都曾萌生出“可不可以自己去做一个舵机”这样的想法呢。你说不定碰到过如此的情景:购买供家用的舵机之时,老是感觉尺码不太合适,扭矩还不足够,又或者是想给孩子参与科学竞赛的作品配备上一颗独具一格的“心脏”。起始之前,咱们先明晰一个核心事实伟创动力舵机,自制舵机的实质,乃借助常见电子元件与机械结构,去模拟成品舵机的基本功能,即响应PWM信号且驱动舵臂旋转至指定角度。这并非要求你在家开设工厂,只需把握几个关键步骤以及避坑技巧句号。
缘何有如此多的人欲自主动手呢?最为常见的缘由乃是“定制化”以及“学习成本”。比如说,有一位身为机器人爱好者之人,其欲求一款具备特定尺寸的微型舵机,然而在市面上所售的最小号成品舵机,却依旧比其所需厚出了2毫米,所以呢,他借助齿轮组以及小型减速电机亲自拼凑出了一个,最终不但将空间方面的问题给解决掉了,而且还节省下了将近一半的开销。还有一种情况较为常见,那就是学生在进行创客项目时,老师会提出要求,要去理解舵机内部的原理,此时,自己动手焊接一个“裸机”,相较于直接购买成品,更能够弄明白反馈电位器、电机驱动以及PID控制之间的关系。
制造一个简易舵机,你切实需要把控的关键要点仅有三个,分别是:电机的挑选,反馈机构,控制逻辑。电机建议选用N20减速电机,其工作电压范围是3V至6V,常见于玩具车,因它减速比大,体积小伟创动力,还自带输出轴,所以极为契合改造。反馈部分,最为简单且成功率最高的做法是采用一个10kΩ旋转电位器,比如B10K,把它的转轴与舵机输出轴同轴相连。控制的逻辑,是依靠着 Nano或者STM32主板,去读取电位器的电压变化情况,凭借PID来驱动电机进行正反转,一直到实际的角度跟目标角度达成一致。
让你能更径直地寻觅到可施行的教程所用的“搜索词”,提议选取以下组合:“自制舵机 N20 电机 电位器 教程”、“ 舵机 DIY 避坑”,这些关键词能够助你筛选出切实含有原理图与代码的高质量视频。
完整制作流程如下:
1. 用来准备各材料,有N20减速电机,其带有长输出轴,还有10kΩ旋转电位器,以及 Nano或者兼容板,再者是L298N或电机驱动模块,另有5V电源模块 ,另有3D打印或亚克力外壳,此可用硬纸板替代测试,还有若干杜邦线和焊锡。
2. 机械进行组装时,要把电机以及电位器,用热熔胶或者螺丝固定于一个底座之上。要保证电机输出轴与电位器转轴借助联轴器或者齿轮紧密相连接。要是采用齿轮传动的方式,建议减速比于1:1至1:3的范围之间,以此来减少回差。
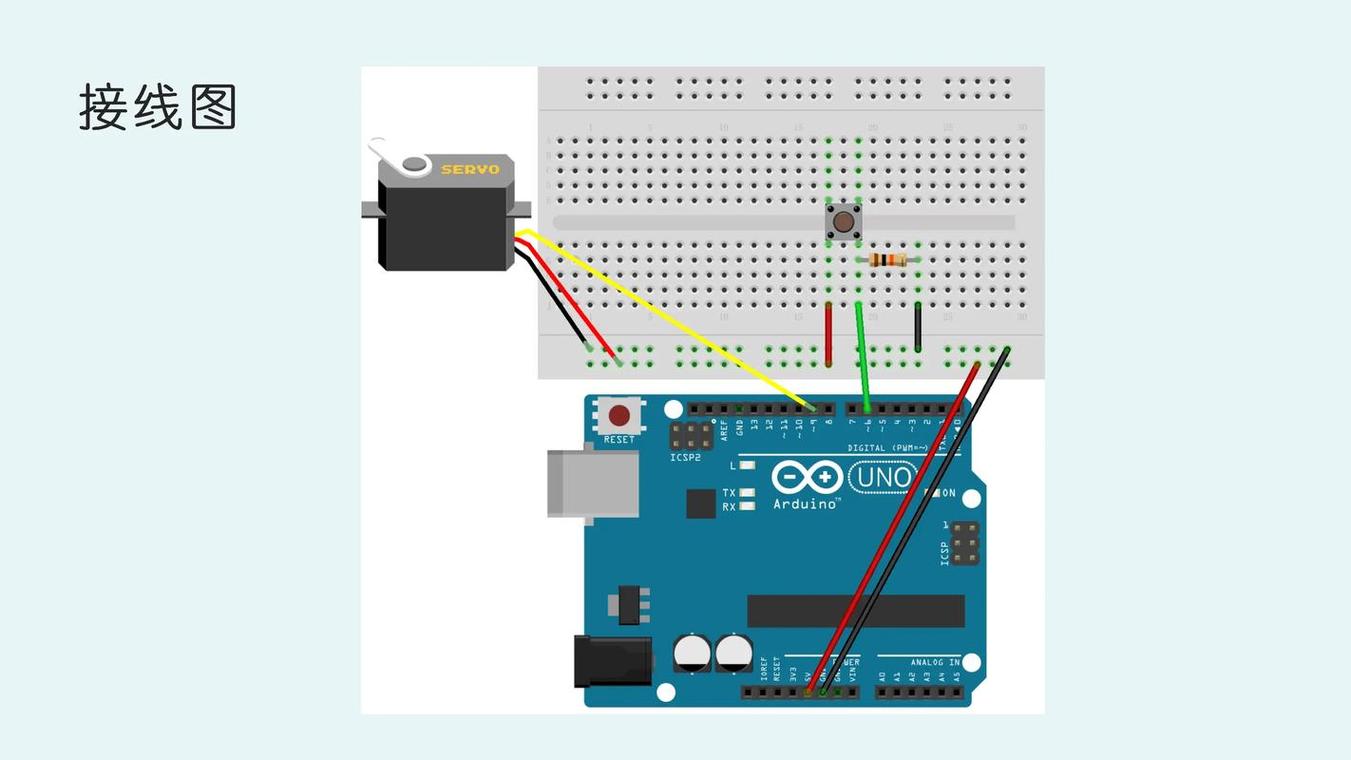
3. 电路连接情况如下,电机的线用于连接具有驱动功能模块的OUT1/OUT2,电位器的三个引脚,分别要连接5V,还要连接GND,并且连接至的A0模拟输入处。驱动模块的IN1/IN2需要连接的数字口,比如D9/D10,ENA要接PWM引脚,类似D5。
4. 改写后的句子:烧录操控代码,于 IDE 里写入标准 PID 控制程式,核心道理在于读取电位器反馈出的电压(0 到:一零二三)的值,将其与目标角度所对应的数值做一差值运算操作来,经由 PID 进行运算操作继而输出 PWM 给到那电机。建议你使用 权威性的 PID 库。
5. 校准跟测试:给电之后借由串口去发送角度指令(举例0到180°),查看舵臂是不是精准停在相应位置。要是产生抖动,那就增大微分系数(Kd);要是响应迟缓,那就增大比例系数(Kp)。常见的初始参数是Kp等于2.0,Ki等于0.5,Kd等于0.1。
几个你避开的“坑”:
齿轮间隙呈现出过大的状况:要是电机输出轴跟电位器并非刚性连接,回差就会致使角度出现不准确的情况。解决的办法是运用联轴器或者直接进行焊接。
电源功率呈现不足状况:N20电机在发生堵转情形的时候,电流能够达到500mA,再把加进来,建议运用额定2A以上那种类型的5V电源,不然的话,就会出现舵机“抽搐”这种状况,甚至还会出现复位情况!
电位器出现磨损情况,普通碳膜电位器的使用寿命大概是数千次旋转,在频繁使用过后就会出现噪声。建议改换成为霍尔角度传感器,比如说,它的成本大约是15元,改换之后精度以及寿命会有大幅提升。
初次调试时,因PID参数不当,把目标角度设定为90°,去观察实际角度是不是“过冲”后回弹,要是过冲严重得以发生,便把Kp减小或者将Kd增加。
当你成功做出第一个简易舵机后,可以进一步尝试:
增加限位开关,防止机械碰撞。
使用蓝牙模块,实现手机控制舵机角度。
将多个自己制作的舵机进行串联,去制作一个简单的机械臂,每个关节处放置一个舵机。
梳理归纳一下:自行制做简易舵机并非难以达成,它仅需一个N20电机,一个电位器,一块以及几行PID代码。最为关键核心的步骤是要保证机械反馈回路精准无误,电源保持稳定,PID参数处于适中状态。要是你在首次测试之际发觉舵机胡乱转动,那就先去核查电位器接线是否准确无误。此刻,即刻开启你的浏览器,搜寻“自制舵机 N20 电机 PID”,进而寻见那个带有完整代码的教程视频,着手去达成你的首个自制舵机吧!请牢记,每一项成功的创客项目,皆是从“自己动手”起始的。























