



























TECHNICAL SUPPORT

发布时间: 2026-05-04
舵机,电机,这是不同本质的两类驱动组件,90%的选型困惑是因概念混淆产生的。
处于日常里的电子设备设计环节,还有在机器人制作期间,以及改装进程当中,好多人会发觉,同样是用以产生运动的部件,为何有的能够精准地停留在某个角度上面,而有的仅仅只是能够一直不停地旋转呢?这背后所存在的恰恰就是舵机与电机的本质区别所在。
核心结论:舵机是一个完整的「位置闭环控制系统」,而普通电机只是一个「旋转动力源」。
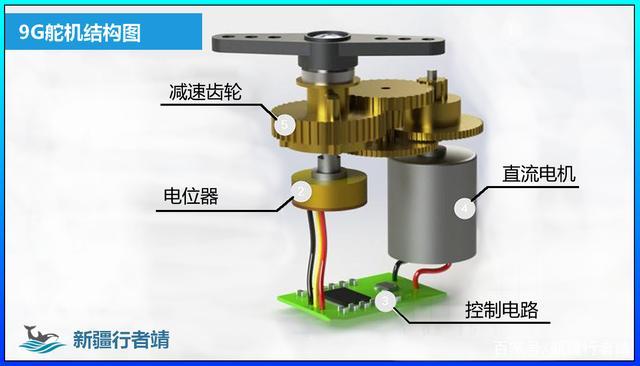
简略来讲伟创动力舵机,平常的电机,像直流电机那样,一旦通电就会转动,一旦断电便会停止,没办法晓得自身转到了哪一个位置,然而舵机内部聚集了电机,还有减速齿轮,以及位置反馈电位器和控制电路,能够依据指令信号准确地停留在某个角度。
为了助力你于选型之际作出正确的判断,下面于结构、控制方式、工作特性、应用场景这四个维度,给出确切的对比:
一个常见情况的案例:
有个对机器人满怀热爱的人,刚开始组装一个机械臂之际,买了4个平常的直流电机以及轮子,然而却发觉这个机械臂断然没法在指定的位置停下来去抓取物体。这便是地地道道的“把驱动类型用错啦”——机械臂的关节所需要的是舵机的位置控制方面的能力,可不是电机的持续不断的旋转能力哟。之后换成舵机以后,机械臂能够精准地停在每一个设定好的角度,顺顺利利地完成抓取动作。
很多人会问:舵机里面既然有电机,那舵机和电机不是一回事吗?
明确回答:不。电机是舵机的核心执行部件之一,但舵机是一个更高层级的组件。
更准确的理解层级关系:
最低层级的部分是:电机,其仅仅承担着将电能转变为旋转机械能的职责,并不带有哪怕任何一点儿的位置反馈以及控制逻辑。
中层部分为舵机,其以电机作为动力核心部位,添加了用以增大扭矩的减速齿轮,还设有用于检测当前位置的电位器,另外配备了能比较目标位置与实际位置,并据此驱动电机运转或停下的控制板。
用人体来类比:
常规的电机恰似手臂部位的肌肉,它仅仅能够进行收缩以及舒张的动作,却并不晓得自身弯曲到达了怎样的角度。
舵机宛如一个完备的“手臂控制系统”,其中涵盖肌肉,还包括骨骼(齿轮),以及关节角度传感器(电位器),另外还有大脑(控制电路)。当你下达“弯曲90度”的指令时,它能够自行完成并予以维持落实。
其权威定义参考为,循着国际自动控制领域的标准分类,舵机属于“伺服机构(Servo )”的一种小型化、低成本达成途径,其本质乃是“带有位置反馈的闭环控制系统”。
这是工程师或爱好者最实际的需求。以下是清晰的判断标准:
在相关操作当中,存在类似此种情况伟创动力,即,有必要对绝对角度或者线性位置予以精准控制,举例来说的话,像是要回转至45°这个角度,又或者是要指向正前方的方向。
需要保持位置抵抗外力(如:机械臂拿起重物时手臂不坠落)
需要在有限角度内往复摆动(如:云台扫描、雷达摆动)
管控信号简易,运用微控制器,像是、STM32这般的,其PWM输出便可达成驱动。
需要连续旋转作为动力源(如:驱动车轮、螺旋桨、钻头)
需要精确控制转速(配合编码器实现闭环速度控制)
这里存在着需要对旋转圈数予以操控的情况以便配合编码器达成多圈位置控制,然而其成本相较于舵机而言是更高的。
处于那种需要具备较高转速情况之下、有着能够实现高功率输出的场景之中,(在相同体积的条件时,普通电机的功率密度一般常常意味着是高于舵机的)。
误区1:用舵机做车轮
错因在于,舵机能够转动的角度范围是0至180°(连续旋转舵机不在此范围),并且它不具备单向高速连续旋转的能力,所以不能被用作车轮驱动。
正确做法:使用直流电机+电机驱动板(如L298N)。
误区2:用普通电机做机器人肩关节
错误缘由在于,普通的电机没办法知晓自身的角度,要是不借助编码器去实施闭环控制,那么手臂就不能够停留在目标所得之位置。
正确的做法是,采用那种能使用舵机的方式,或者用那种把直流电机、磁编码器以及PID控制结合起来的方式,但这种方式成本高而且很复杂。
当你拿到一份舵机或电机的规格书时,重点关注以下参数:
存在这样一种经过改装的舵机,其将角度限位予以去除,能够进行连续旋转,不过依旧需要加以留意:

它并非借助PWM占空比来操控转速,而是对方向以及转速予以控制,且当占空比为50%时停止,若小于或大于50%则会朝着不同方向进行旋转。
它没有绝对位置反馈,无法知道自己转到了多少圈
适合制作小型坦克、机器人底盘等对位置要求不高的场景
1. 在普通直流电机那尾部,去进行加装编码器,此编码器包括光电编码器或者磁编码器。2. 配合着控制,能够达成角度以及转速的精确控制。
优势:可以做到舵机的角度控制,同时支持多圈连续旋转
劣势在于,要需要另外的编码器反馈读取,以及PID控制,其开发复杂度比舵机远远高出。
成本:编码电机+驱动板+主控的计算资源,通常高于同性能舵机
选择建议:
要是你存在单圈角度控制的需求,并且没有连续旋转的那种需求的时候,优先去选择舵机,这里的舵机具有简单、成熟以及成本低的特点。
要是你有对于多圈绝对位置方面的控制需求,像是数控机床、机械臂的多圈旋转关节这种情况,那就一定得选用编码电机以及绝 对值编码器句号。
本质的区别中,电机属于单一的旋转动力源,舵机则是集成了电机的,具备减速功能的,有着反馈作用的,包含控制部分的完整位置伺服系统。
本质在于选型:若存在需要精准停歇于某个特定角度的情况,那么就要选择舵机;设若存在需要持续不断地进行旋转驱动的状况,那么就要选择普通电机以及驱动板。
最为常见的差错是,将舵机用作车轮,或者把普通电机用于需要停止在特定角度的关节处。
1. 于项目设计的起始阶段,去核实驱动需求,询问自身“此运动是要持续地转动,还是要停歇在一个固定的角度呢?”,这乃是区分舵机与电机的首要准则。
2. 查看规格书之际,要看“类型”这个字段,去确认所写的究竟是“Servo(舵机)”,还是“DC Motor(直流电机)”,切不可仅仅只是看外观。
3. 如果仍不确定,按以下流程执行:
输出端是否需要精确停在指定角度?(是→舵机,否→下一步)
需不需要以连续旋转当作动力呢?如果答案是肯定的,那么采用普通电机加上驱动板;要是答案是否定的,那就使用舵机。
需不需要在同一时间进行连续转动和精准的定位呢?如果答案是肯定的,那么就需要编码电机以及闭环控制,不过这样成本会比较高。
照上述三点去执行,能够避免百分之九十以上的选型错误。要是在实际应用里碰到特殊需求,像是防水、高温、低噪音这些情况,基于舵机和电机型号进一步筛选防护等级以及材质,而非重新判定两者的基本区别。























