



























TECHNICAL SUPPORT

发布时间: 2026-05-05
本文给您呈上串口舵机控制器的标准接线法子。毋论您用的是TTL串口舵机,还是RS485串口舵机,正确连电源线与数据线,是保障设备正常运作的首步。错误的接线,兴许致使舵机没法回应,或径直损坏。接下来以极常见的USB转串口模块(像、CH340方案)跟串口舵机相连为例,给出两种经证实的接线方案。
对串口舵机控制器,像、STM32或者专用串口舵机控制板这类,这些与舵机之间的连接,是一定要遵循下面这样的三线规则的,并且缺一而不可:
【重点予以提醒】:存在着相当数量的用户,其接线遭遇失败,而失败的缘由乃是忘记了进行共地操作,具体而言,也就是控制器的GND与舵机的GND之间未曾实现连接。这乃是诱发舵机毫无响应、控制信号出现乱码情况的占据首位的原因。
典型应用有,微型机器人舵机伟创动力舵机,还有6V到8.4V供电的串口舵机,像EM3、等TTL协议舵机。
接线步骤(共4步,按顺序执行):
1. 接上电源:把舵机的VCC线,也就是通常的红色那根线,连到稳压电源的正极,将电压设置成舵机标称的电压,比如说7.4V。
2. 针对公共地进行连接:把舵机的GND线,也就是颜色通常为黑色或者棕色的那根线,连接至电源的负极之处,与此同时,要把这根线在此处与控制器,也就是USB转串口模块的GND引脚进行短接。
3. 连接数据线,把控制器的TX引脚所在处,连到舵机的RX引脚那里,要留意,串口通信是交叉连接这种情况,也就是TX通向RX,RX通向TX。
4. 检查电压对应情况:要是控制器给出的输出呈现为5V,而舵机方面是支持5V TTL的情况,那么就能够直接进行连接;但要是这个舵机仅仅是支持3.3V TTL的状况的话,那就需要在TX敷设的线路上边串联1kΩ对电阻,或者是去使用电平转换模块的哟。
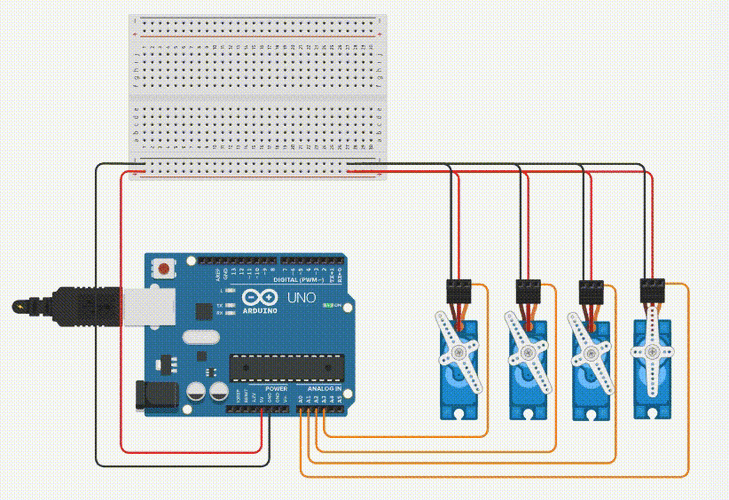
接线示意:
[USB转串口模块] [串口舵机]
TX ————————————————→ RX
RX ←———————————————— TX
GND ————————————————— GND
VCC —→ 接7.4V正极
GND —→ 接7.4V负极(与上方GND共点)
典型应用包含,在工业场景里起到操纵作用的机械臂,还有涉及多个舵机进行级联控制的情况,像所具备的RS485模式这般的情形。
接线步骤(共3步):
1. 连接电源以及地线,这与方案一情况一样,VCC去连接舵机电源的正极,GND连接电源负极,并且要把控制器的GND和它共同接地。
2. 接差分数据线,把A加号(或者四百八十五A哦)的控制器接去所有舵机的A加号引脚处,将B减号(或者四百八十五B呀)的控制器接至所有舵机的B减号引脚处。
3. 终端电阻匹配的情况是这样的:处于总线最远端的是两个舵机,然后,在这两个舵机之间,于A+与B 线路之上,要并联120Ω终端电阻,并且需要注意,根据总线长度来看,一般120Ω是标配。
接线示意:
[RS485控制器] [舵机1] [舵机N]
A+ ———————————————————→ A+ ——————————→ A+
B ———————————————————→ B ——————————→ B
GND —————————————————→ GND ————————→ GND
VCC VCC
完成接线后,请按以下顺序验证伟创动力,缺一不可:
1. 针对电源进行检查,在给设备通电之前,运用万用表去测量舵机VCC跟GND之间所得的电压,进而确认其正在舵机标称电压的正负5%范围以内。
2. 对信号线进行检查,在处于断电状态的情况下,运用万用表的通断档,来测量控制器的TX以及舵机的RX之间,是不是处于导通的状态,也就是不存在短路到GND或者VCC的情况。
3. 实施共地确认操作,需测量控制器GND与舵机GND之间所呈现的电阻,该电阻小于0.5Ω。
4. 发送测试指令,借助串口调试助手,像SSCOM、这类,去设置恰当的波特率,常见的有9600、,接着发送舵机角度指令,比如“#1 P1500”或者16进制指令帧,随后观察舵机是不是会转动。
【常见故障排除】:
若舵机毫无任何反应,大概率有90%的可能性是电源未接通或者共地失败。要去检查VCC和GND的连接,还要确认电源功率足够,须知单个串口舵机启动电流可达到1A至2.5A。
出现舵机抖动,或者出现舵机乱转的情况,这是因为存在以下两种状况,一是信号电平不匹配,比如说利用5V控制器去驱动3.3V的舵机,二是波特率设置错误,要借助示波器或者逻辑分析仪抓取TX引脚波形来进行确认。
仅仅朝着单一方向转动:舵机角度指令所呈现的格式是错误的。去查阅舵机数据手册里的指令协议,比如说是不是需要添加校验和,还有帧头与帧尾的情况。
严禁在数据线处于热插拔状态时进行操作:当处于带电状态的情况下,插拔串口线这种行为有可能致使 IO 口被击穿。一定要按照先把电断掉,接着连接线路,再开启电源的顺序来操作。
电源得要是独立的才行,对于从控制器板载的3.3V/5V引脚取用电力来驱动舵机这种做法可不建议,只有舵机电流比200mA小的时候不属于此列。大多数串口舵机供电得靠独立的稳压电源。
舵机电压绝对匹配情况如下:把7.4V的舵机接入5V电源时,会出现扭矩不足的状况;而把5V舵机接入7.4V电源,驱动芯片会立刻被烧毁。
结论是:串口舵机跟控制器接线的仅有的正确公式为:VCC去连接匹配电压,至于GND要和控制共同接地,TX/RX交叉或者差分要对应,并且在上电之前要验证电压。
请您立即执行:
1. 结合舵机的型号,这需要去查阅外壳标签或者数据手册,进而确定供电电压以及信号电平的类型,也就是TTL或者RS485。
2. 把当前接线的照片,据此对照方案一的接线图,或者对照方案二的接线图,来进行核对,着重检查共地点。
3. 连接之后,先不要接上舵机,使用万用表对控制器TX引脚与舵机RX引脚之间的电压进行测量,测量时是针对GND的,在没有信号的情况下,其应该为高电平,这里的TTL是3.3V或者5V。
4. 如果没有十足的把握,那就先采用低电压进行测试,这个低电压是舵机额定电压的下限,在所确认控制是正常之后,再将电压升高到额定值。
依照本文所阐述的接线规则以及验证步骤来进行操作,您能够保证串口舵机控制器同舵机之间的首次连接实现成功。要是仍然遭遇问题,那就请再次仔细检查“共地”与“电压匹配”这两个最为关键的环节。























