



























TECHNICAL SUPPORT

发布时间: 2026-05-09
核心结论是,步进电机在开环精确位置控制方面表现出色,它适用于像3D打印机、CNC雕刻机这类需要重复定位然而负载不大的场景伟创动力舵机,而舵机自身带有闭环位置反馈,它适用于机器人关节、航模舵面等这类需要大扭矩并且要保持固定角度的场景。若是选错类型,那么就会致使设备抖动,或者导致丢步情况发生,若严重更可能造成烧毁现象——接下来借助8组对比下的图片以及实际拍摄得到的案例,助力你一次性完全彻底地分辨清楚。
步进电机:圆柱形或方形机身,后方有明显的一束引出线(通常4根、6根或8根),输出轴为光轴或带扁位
舵机,其机身呈现扁平方形,有三根引线,分别是电源正极、地以及信号,输出轴为十字形状或者是带有齿的圆形,而且在顶部一般是通过螺丝来固定舵盘的。
步进电机的内部情况是这样的,定子带有齿槽,转子是永磁体,并且没有减速齿轮,属于低速直驱的类型。
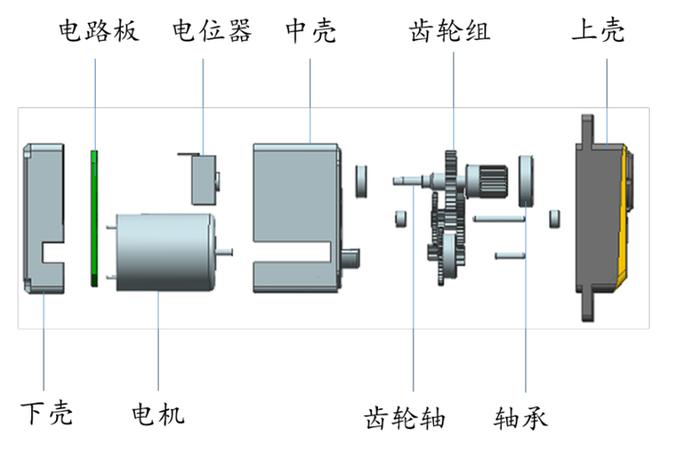
位于舵机内部的部分有,小型直流电机存在,以及四级行星或者金属齿轮减速箱存在,还有电位器或者编码器存在。
若将步进电机拆开呀,那么能够看见的是多层的线圈绕组,以及磁片;要是把舵机拆开呢,能够看得出的是控制电路板,其中集成了驱动、电位器反馈,还有小电机带动齿轮链。
事例:有个爱好者,将自己的3D打印机挤出机,那是具备步进电机的,还有机器人爪子,也就是装有舵机的,进行拆解,察觉到步进电机的内部,并不存在减速器,然而,那个舵机的齿轮组,占据了三分之二的体积。
连接方式为典型情况时:从控制器出发,连接至步进驱动器(像是 这种),而后步进驱动器再连接到步进电机。在图里能够看到 A、B 两相绕组。
将舵机的红线,连接至5V,把舵机的棕线,连接到GND,将舵机的橙线,连接于PWM引脚,比如说的9号脚。并不需要中间驱动器。
步进电机:脉冲序列(频率决定转速)
舵机,其周期为20毫秒,高电平处于0.5毫秒至2.5毫秒之间,此范围对应着从0度至180度。
常规情形:机器人运用16路舵机驱动板,步进电机采用CNC (带有A4988模块)。
有这种情况,有人尝试靠着舵机控制程序去直接驱动步进电机,步进电机是接PWM信号的,然而呢结果步进电机不转动,或者发出那种嗡嗡响的声音,这是为啥呢,是由于控制逻辑存在着完全不一样的状况。

当每一次输入一个脉冲之时,电机就会转动一个固定的步距角,比如说那1.8°,即使是没有反馈的情况下,也能够累计达到200步从而转上一圈。在低速的状况之下,可以精确地停留在任意的位置。
收到PWM信号之时,舵机朝着目标角度迅猛高速冲去,而后进行锁住,要是外力把输出轴给掰开,舵机会凭借闭环作用自行回位。
步进电机,其理论步距角为1.8°,存在正负5%的偏差,这是在无负载的情况下,当负载增大之时,有可能会出现丢步现象,前提是无反馈。
用以控制舵面转动的舵机,其典型的精度处于1°范围以内,特指带有电位器反馈功能的那种,数字舵机能够达到0.1°的精度,哪怕是在外力产生干扰的情况下,它也可以对自身位置进行修正。
步进电机:转速越低扭矩越大,超过后扭矩快速下降
舵机,其转速是固定的,大概在0.1至0.2秒每60°,扭矩会随着电压升高而增大,堵转转矩能够达到20kg·cm以上。
案例呈现,采用步进电机去做成机械臂关节之时,出现断电之后位置丢失的情况;将其替换为大扭矩舵机加上角度反馈后、断电之后重新上电居然能够记住角度(此情况需要配备磁编码器)。然而,运用舵机去驱动传送带却因为转速太过缓慢而导致失败。
左下图,3D打印机的X轴,运用步进电机,此为开环模式,做往复运动,且不需要大力矩,Y轴同样如此。
右图:桌面机械臂每个关节使用舵机(需保持位置、反抗重力)
CNC三轴全部用步进电机(高刚性、低速切削)
两轴云台使用舵机(摄像头指向控制,需快速响应)
步进电机控制旋转式门锁(360°连续旋转,用限位开关归零)
玩具小车舵机直接拉杆转动轮子(0~180°摆动)
丝杆滑台被舵机驱动出现错误,舵机转动角度最多为180°,并且其转速太过缓慢致使行程不够。
给机器人头部俯仰进行控制时,使用步进电机出现了错误情况,因为没有反馈,造成上电之后头偏向一侧伟创动力,每次都需要去寻找原点。
是否需要360°连续旋转? → 是 → 步进电机或无刷电机
↓ 否
是否需要保持位置抗外力? → 是 → 舵机(大扭矩)
↓ 否
是否要求低速大扭矩且低成本? → 是 → 步进电机
如果出现缺相这种情况,也就是某一线没有接好的状况,那么就要去检查A+以及A,还有B+以及B,看它们是否全部接通。
电流太小 → 调节驱动器电流旋钮
电位器磨损 → 更换舵机或加谐波润滑脂
要是电压处于不足的状况,那就采用独立的5V或者7.4V来进行供电,记住,千万别直接从单片机那里获取电力供应哦。
“步进电机连接PWM信号”,拿来与“舵机连接脉冲加上方向信号”这一情况作对比,结果两下均不能够正常地启动并运行。
基座旋转:步进电机(连续旋转且负载小)
大臂俯仰:大扭矩舵机(保持姿势)
> 记住两句话:
> 需要一直转、走准确距离 → 步进电机
> 需要转到固定角度、扛住外力 → 舵机
重复核心观点:步进电机和舵机最大的差异之处在于有没有闭环反馈以及能不能持续旋转,步进电机没有反馈不过能够进行360°无限转动,舵机带有反馈但是一般情况下限位在0~180°(连续旋转舵机除外)。
建议按以下三步选型:
1. 确定好运动的类型:究竟是那种连续旋转情况(就像传送带、螺旋推进这一类),还是角度摆动情形(类似关节、云台这样)呢?对于连续旋转这种情况优先考虑采用步进电机,而角度摆动这种情况优先选用舵机。
2. 评定是不是要位置记忆,在掉电以后再次上电的状况下,是否需要自行返回先前的位置呢?要是需要的话,那就必定要选择舵机(或者是步进电机加上编码器)。
3. 计算扭矩与速度:负载大且速度低(<300rpm)用步进电机;瞬时大扭矩但行程短用舵机。
完成最终验证:去下载文中的30张对比图,这些图要通过自行运用搜索引擎,输入“步进电机解剖图”“舵机内部齿轮图”“步进电机和舵机接线对比”等关键词来获取实拍图片,然后将这些图片逐一与你的实际设备进行对照,仅仅三分钟时间,就能够达成彻底掌握选型,从而以后不会再出错的结果。























