



























TECHNICAL SUPPORT

发布时间: 2026-05-09
本文直接给出SG90舵机的完整原理剖析,涵盖,内部电路组成,3线接口界定,PWM控制信号参数,以及典型接线图示。不论您是将其用于机器人,还是智能车,亦或是控制,以下内容均可助您迅速把握核心要点。
控制电路板、直流电机、齿轮组以及电位器(位置反馈)而构成了SG90舵机内部部分结构,其核心原理图涵盖了以下模块:
1. 信号解析单元:接收外部PWM信号,将其转换为电压比较值。
2. 位置反馈单元,电位器会随着输出轴进行转动,进而输出与当前角度相对应的电压。
3. 误差放大单元:比较目标电压与反馈电压,驱动电机转动。
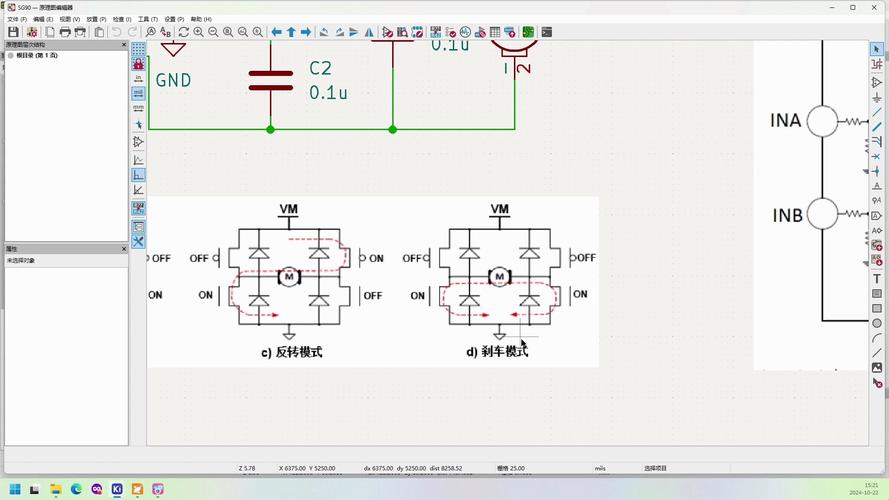
4. 电机驱动单元:H桥电路控制电机正反转。
以下是该结构所属为闭环控制回路的情况:先是有控制器发出PWM,接着舵机内部进行比较,然后由电机作出调整,继而则是电位器反馈,最终达到目标角度便停止运转。
从SG90舵机引出的线头为3根,颜色的标准情况是这样的(按照常见的情形来讲,多数品牌都是依照这个来进行定义的):
实际操作中易犯错误:
红色线被错误地接至更高的电压,比如12V,这种情况会致使内部驱动芯片被烧毁。
将棕色线与橙色线接反,舵机无响应且可能发烫。
角度由SG90舵机,通过周期为20ms、高电平宽度在0.5ms至2.5ms之间的PWM信号进行控制。以下是核心参数:
关键验证数据:
在实际进行着的控制里头,有着这样一种情况,与1.5ms的高电平相对应的是中位啦,而这个中位呢大约是90°,这可是经过普遍的验证之后所得到的标准数值哟。
超过0.5毫秒至2.5毫秒区间范围的状况下的高电平信号,有可能致使舵机持续不断地发出奇怪声响或者出现被限制在某个位置而无法正常活动的卡死现象。
频率被固定为50Hz,其周期是20ms伟创动力舵机,绝大多数的微控制器,像、STM32、ESP系列,都能够直接输出这个信号。
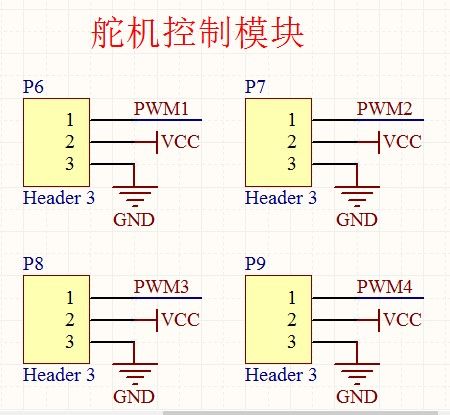
以下为SG90舵机与标准5V单片机系统的连接方式:
单片机端 SG90舵机
5V引脚 → 红线(VCC)
GND引脚 → 棕线(GND)
PWM引脚(如D9)→ 橙线(信号)
实际接线要点:
提供足够电流时电源独立,SG90堵转一下电流大概就是500mA至800mA,假设有多个舵机一块动作,推荐去运用外部5V BEC或者稳压模块,防止从单片机那里取电造成复位。
对于信号线电平,3.3V的单片机,像这种,它能够直接进行驱动 ,而SG90内部所识别的低电平是在0.8V以下 ,其识别的高电平则是在2.0V以上。
解决路径:
1. 先检查棕色线是否与单片机共地。
2. 再借助示波器,或者利用逻辑分析仪,去确定一下PWM周期是不是在20ms加上或者减去1ms这个范围之内。
3. 若以上正常,则可能是舵机内部机械故障,需更换。
核心观点再次强调:
SG90舵机原理图,其本质是位置闭环控制系统,它的核心部件是“PWM解析”,还有“误差比较”,以及“H桥驱动”,另外还有“电位器反馈”。
三线接口存在着肯定的顺序,这个顺序是,棕色的线代表着地,红色的线代表着5V,橙色的线代表着信号,要是接错了,那么就会出现或者是损坏,又或者是失控的情况。
具有唯一性的控制信号标准:是50Hz,处于高电平下,从0.5ms至2.5ms这一范围,则与0°到180°相对应。
立即可以执行的行动建议:
1. 下载一份SG90接线草图,或者手绘一份SG90接线草图,将其贴在实验台旁边,以此避免每次接线的时候反复去查资料。
2. 使用示波器实际测量自身的控制器PWM波形,以此来进行验证,周期应为20ms,高电平宽度可调节的范围要涵盖0.5ms至2.5ms。
3. 在首次进行驱动之时,要以慢速的状态逐步去增加占空比,比如说自1.5ms朝着1.0ms进行变化,且间隔为500ms,然后去观察一下舵机的动作是不是平滑的,以此来避免出现硬限位冲击的情况。
4. 要是项目存在多台舵机同时进行动作的需求,那就得单独去计算总电流伟创动力,接着选用至少2A往上的5V稳压电源,另外所有舵机的GND和单片机的GND实施单点共地。
依照上述原理图以及接线指导,您能够正确且安全地驱动SG90舵机,并且能自主排查超过80%的常见故障。























